

Постановка проблемы. Анализ современных малогабаритных аппаратов, предназначенных для решения различных задач в условиях ограниченного пространства, показал, что существует ряд случаев, когда энергетически не выгодно, либо невозможно использовать летающий аппарат[1], а так же не возможно эффективно решать поставленные задачи с помощью колесных машин в условиях поверхности, не предназначенной для их движения. Под ограниченным пространством[2] здесь подразумевается закрытое помещение промышленного объекта, имеющее большое количество препятствий различного рода, таких как машины и механизмы, различные преграды, которые аппарат не может преодолеть, а так же ступеньки, пороги либо другие изменения уровня поверхности помещения.
При решении задач мониторинга[2] таких объектов с помощью малогабаритных летательных аппаратов, возникают существенные трудности навигации аппарата в сложной обстановке. Управление летательным аппаратом[1] в трехмерном пространстве с препятствиями является задачей не тривиальной и для каждого типа замкнутого окружающего пространства в отдельности требует разработки соответствующих алгоритмов управления. Сложность навигационной задачи, которую аппарат вынужден решить на борту, определяет время, проведенное аппаратом в воздухе без совершения полезных действий, что влечет за собой расходование весьма ограниченного ресурса топлива.
Для колесных машин[3] одним из значительных ограничений является частое изменение уровня поверхности, по которой происходит движение, что требует установки пандусов и других конструкций, которые позволили бы такому колесному средству преодолеть ступеньки и пороги различной высоты.
В статье будет рассмотрен малогабаритный мобильный робот, являющаяся не такой требовательной к топливным ресурсам, как летательный аппарат, и способный преодолевать препятствия, высота которых превышает радиус колеса соответствующего колесного средства.
Анализ последних достижений и публикаций. Создание шагающих роботов и исследования в этой области стали активно развиваться начиная с 70х годов прошлого века, одним из оснований чему послужил резкий рост мощности вычислительной техники.
На сегодняшний день существует целый ряд промышленных и военных шагающих машин различного назначения а так же ряд образцов, созданных в различных странах для лабораторных исследований.
Среди мировых разработок стоит выделить разработку американской кампании DARPA Dynamics, презентовавшей в 2005 году мобильного робота-мула, предназначенного для перемещения груза до 110 килограмм за солдатами в зоне боевых действий. Так же в DARPA разработан ряд различных образцов, таких как робот Cheetah моделирующий различные этапы бега гепарда, способный развивать скорость до 19 километров в час, а так же малогабаритный робот оснащенный набором сенсоров и имеющий возможность обучения в процессе перемещения для выработки наиболее эффективных алгоритмов движения по неровной поверхности.
В 2010 году в московском технологическом институте имени Баумана был создан двуногий шагающий робот для исследований подобной динамической схемы.
Цель статьи состоит в формировании общих принципов управления мобильным роботом.
Основной материал. Разработан мобильный робот, имеющий возможность транспортировать на борту грузы, массой до шестидесяти процентов от своей массы. В составе системы управления робот имеет трехстепенной блок цифровых акселерометров и две видеокамеры, разрешающей способностью 640х480 точек, работающие в оптическом диапазоне. Кинематическая схема состоит в следующем: к основной несущей балке конструкции сверху горизонтально прикреплена платформа для размещения полезной нагрузки, с таким расчетом, чтобы распределение массы полезной нагрузки приходилось симметрично вдоль продольной оси симметрии конструкции, под балкой находятся крепления для установки аккумуляторных батарей, к концам балки прикреплены на подшипниковой опоре симметричные плечи, так чтобы была возможность их вращения вокруг двух вертикальных осей соответственно. так же на обеих плечах установлено по три привода, обеспечивающих поддержание всей платформы в вертикальной плоскости и вращение плеч. пара приводов обеспечивает поворот каждого из плеч в горизонтальной плоскости, четыре же остальных привода служат для поднимания и опускания опор конструкции и поддержания ее в вертикальной плоскости.
Видеокамеры установлены по краям одного из плеч и направлены по направлению движения платформы. Такая особенность позволяет отказаться от системы позиционирования видеокамер, что значительно упрощает алгоритмы навигации. Кинематика платформы разрабатывалась специально для эффективного управления видеокамерами.
Отличительной особенностью кинематической схемы известных аналогов, использующих четыре опоры, от данного аппарата состоит в том, что аналоги используют опоры, каждая из которых имеет минимум две вращательные степени свободы. Такая схема делает систему перемещения платформы более требовательной к энергетическим ресурсам но дает возможность размещения всех элементов конструкции и полезной нагрузки на неподвижном корпусе. Рассматриваемый здесь аппарат имеет подвижный корпус, что дает ему преимущество по энергозатратам перед аналогами.
Задачи, решение которых будет проводиться с помощью рассматриваемого мобильного робота, можно объединить в несколько групп:
- задачи, где необходим осмотр либо постоянный мониторинг объекта без участия человека;
-задачи осмотра аварийных объектов и предварительный контроль состояния объектов претерпевших аварию.
Управление объектом такого типа фактически сводится к управлению сервоприводами. На данном этапе проектирования в конструкции используются аналоговые сервоприводы TowerPro-90, управляемые широтно-модулированными импульсами. Выходной вал сервопривода имеет возможность поворачиваться в диапазоне от 0 до 180 градусов. Угол поворота выходного вала сервопривода определяется шириной управляющих импульсов. Для использованных приводов управляющие импульсы шириной равной 50мс служат сигналом поворота качалки в крайнее положение против часовой стрелки, импульсы шириной 30мс служат сигналом поворота в крайнее положение по часовой стрелке условно приравниваемые к 0 и 180 градусов соответственно.
На данном этапе система управления состоит из основного блока, отвечающего за управление сервоприводами в соответствие с командами оператора, либо контуром управления более высокого уровня, а так же корректирующего блока, в котором величины для управления сервоприводами преобразовываются в соответствие с показаниями блока датчиков. До поступления новой команды система циклически выполняет последнюю полученную команду. Таким образом, при формировании оператором, либо контуром управления более высокого уровня, сигнала о типе движения платформы, в основном блоке для сервоприводов формируются зависимости ширины управляющих импульсов от времени. Далее, в блоке коррекции, используя показания блока датчиков, эти зависимости преобразуются так, чтобы робот продолжал движение заданного ранее типа не теряя его эффективности.
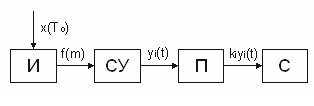
Рисунок 1 – Структура системы
Где:
И – интерфейс взаимодействия с системой.
СУ – система управления.
П – преобразователь.
С – сервоприводы.
x(To) – входной сигнал системы в двоичном виде.
To
– период дискретизации при передаче данных.
f(m) – управляющий сигнал на входе системы.
yi(t) – сигналы управления сервоприводами.
кi – коэффициент преобразования i-того сигнала.
i є {1,2..6}
(1)
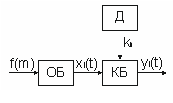
Рисунок 2 – Схема системы управления
Где:
ОБ – основной блок.
КБ – корректирующий блок.
Д – блок датчиков.
xi(t) – зависимости для управления сервоприводами.
kn
– показания n-того датчика.
n є {1..3}
(2)
Алгоритмы управления роботом строятся исходя из структуры системы по описанному выше принципу – формируется управляющая команда x(To) которая за тем передается на вход интерфейса взаимодействия с системой. После получения команды формируются величины для управления сервоприводами и величины задержек в их работе и формируется управляющий сигнал f(m). Системой управления формируются зависимости управления сервоприводами xi(t), за тем опрашиваются датчики и корректирующим блоком формируются коэффициенты для сигнала управления сервоприводами, после чего управляющий сигнал, преобразованный в соответствие с показаниями датчиков, поступает на вход аналогового преобразовательного блока управляющего уровнем сигнала в соответствии с характеристиками сервоприводов.
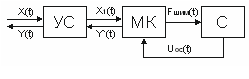
Рисунок 3 – Общая структура устройства
Где:
УС – устройство сопряжения.
МК – микроконтроллер.
С – сервоприводы.
X(t) –управляющие сигналы.
Y(t) – выходные сигналы.
X1(t) –управляющие сигналы контроллера.
Y`(t) – выходные сигналы контроллера.
Fшим(t) – широтно модулированные сигналы управления сервоприводами.
Uос(t) – напряжение обратной связи сервоприводов.
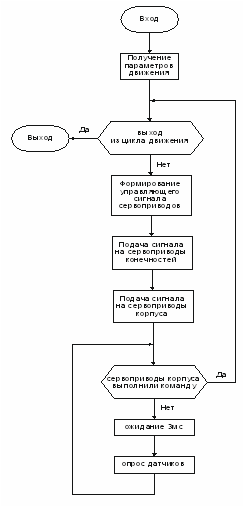
Рисунок 3 – Общий алгоритм управления
В случае потери аппаратом динамической устойчивости во время движения по маршруту, геометрия и взаимное расположение органов аппарата, позволяют системе управления вернуть его работоспособное состояние путем выполнения ряда манипуляций подвижными частями механической системы. При потере динамической устойчивости аппарат в первую приводится в статически устойчивое состояние, за тем в несколько этапов центр тяжести перемещается относительно центра масс таким образом, что аппарат разворачивается вокруг продольной оси симметрии на 180 градусов. Побочным эффектом таких действий является разворот аппарата на 30 градусов вокруг вертикальной оси, что требует в дальнейшем дополнительных перемещений для возвращения аппарата на исходный маршрут следования.
Выводы. Полученные в статье принципы управления и общая структура системы управления мобильным роботом могут быть использованы для исследования различных эксплуатационных характеристик как существующих, так и перспективных транспортных средств подобного типа.
Библиографический список
- Матвеев С.И. Высокоточные системы РВ и А: перспективы и основные направления работ по созданию разведывательно-ударных и разведывательно-огневых комплексов / С.И. Матвеев [текст] Военная мысль. – 2003. – № 2. – С. 23-27.
- Мясников Е.В. Высокоточное оружие и стратегический баланс (издание Центра по изучению проблем разоружения, энергетики и экологии при МФТИ). [Tекст]/ Е.В. Мясников – Долго-прудный, 2000. – 43 с.
- Дергачов К.Ю., Флерко С.М., Кравцов Д.В. Методика визначення оптимальних маршрутів руху рухомих об’єктів у комплексі задач командного пункту диспетчерської системи [Текст]/ К.Ю. Дергачов, С.М. Флерко, Д.В. Кравцов Системи обробки інформації Харків: НАНУ, ПАНМ, ХВУ. – 2005. – Вип. 1. – С. 213-217.