

В промышленности для решения большинства технических задач используются управляющие устройства называемые промышленными контроллерами.
Промышленный контроллер предназначен для автоматизации технологических процессов и в большинстве случаев используется для конкретного технологического процесса.
Снижение стоимости и возможности промышленного контроллера работать с любым оборудованием позволяет разрабатываемому контроллеру быть конкурентно способным на рынке.
Создание адаптивного контроллера требует решения нижеперечисленных задач:
-
Разработка и моделирование силовой части контроллера;
-
Построение силовой части контроллера;
-
Разработка и моделирование логики формирования сигналов задания;
-
Построение математической модели контроллера;
-
Создание опытного образца.
Для моделирования используются программные среды Proteus и Flowcode.
Ниже представлены тестируемая схема силовой части разрабатываемого контроллера (рис 1.) и блок-схема задающих сигналов работы микропроцессора (рис 2.) .
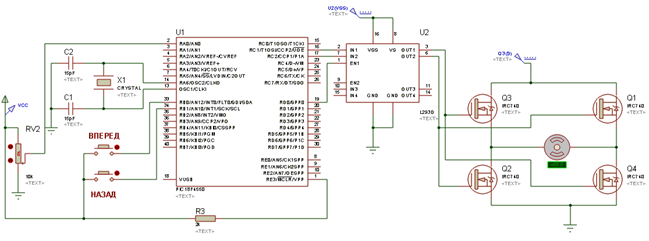
Рисунок 1. Силовая часть контроллера.
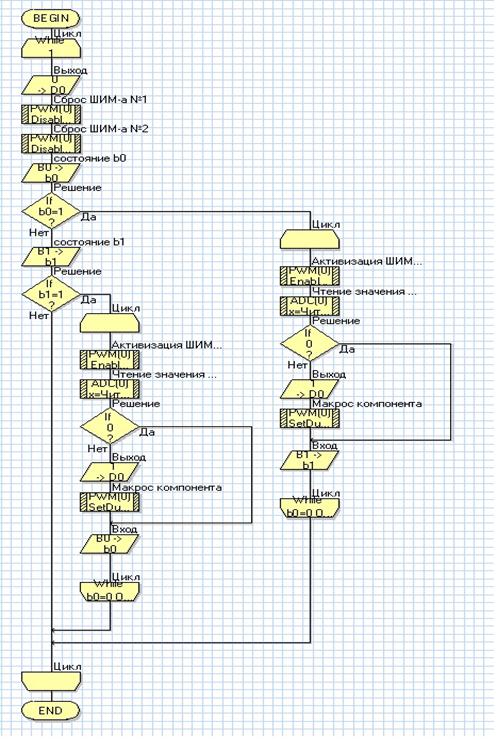
Рисунок 2.
Блок-схема.
Разрабатываемый контроллер должен повысить энергоэффективность, что должно дать положительный экономический эффект.
Разработка может применяться как в промышленности так и в любой другой сфере.
Библиографический список
- Нарышкин А.К. «Цифровые устройства и микропроцессоры», Академия, 2006 год, 320 с.
- Белов А.В. «Создаем устройства на микроконтроллерах», СПб.: Наука и Техника, 2007 год, 304 с.
- Корабельников Е.А. «Самоучитель по программированию PIC микроконтроллеров», 2008 год, 287 с.
- Шпак Ю.А. «Программирование на языке С для AVR и PIC микроконтроллеров», «МК – Пресс», Киев, 2006 год, 400 с.
- Datasheet на PIC18F4550