

Динамический модуль упругости – величина, характеризующая упругие свойства бетона без влияния ползучести, так как динамический модуль упругости определяется при колебаниях образца, при которых деформации и напряжения не велики [1]. В связи с этим динамический модуль упругости выше статического. Соотношение этих характеристик – величина не постоянная и зависит от различных факторов, в основном, от прочности бетона [1].
В соответствии со сложившейся системой нормативных документов динамический модуль упругости не является основным или факультативным показателем качества строительных материалов.
Изменение динамического модуля упругости бетона при циклическом замораживании-оттаивании рекомендуется использовать по одной из методик определения морозостойкости бетона [2].
Кроме того, этот показатель может быть использован в исследовательской практике в качестве одного из косвенных показателей прочности для неразрушающих методов исследования кинетики твердения цемента. А с развитием методов расчёта поведения конструкций и сооружений при динамических и колебательных воздействиях, динамический модуль упругости будет иметь значение одной из основных характеристик конструкционного материала.
Для определения динамического модуля упругости используются методики, основанные на измерении резонансной частоты образца или скорости звука в материале. Для расчёта динамического модуля упругости по скорости звука необходимо знать дополнительный показатель – коэффициент Пуассона, точность определения которого невелика. В связи с чем, последняя методика не рекомендуется [1].
Более точно определить динамический модуль упругости можно по резонансной частоте колебания образца. На этом принципе основан прибор ИКВТ-2 [3], схема которого показана на рисунке. На жёстком основании (1) крепятся опоры (2), расстояние между которыми может изменяться в зависимости от разметов образца. Опоры должны находиться на расстоянии 0,22L от его торцов (L – длина образца). Образец (3) с наклеенной на его край пластиной (4) размером 15×15×0,2 мм из магнитной стали устанавливается симметрично относительно опор. С помощью регулировочного винта электромагнитный датчик (5) устанавливается таким образом, чтобы зазор между поверхностью датчика (5) и пластины (4) не превышал 1 мм. Датчик и измерительный блок прибора соединяется с помощью экранированного кабеля (6).
Регулируя частоту колебаний по трёхдиапазонной шкале (7) подают звуковой сигнал на электродинамическую головку (8), которая излучая звук, возбуждает изгибные колебания в образце.
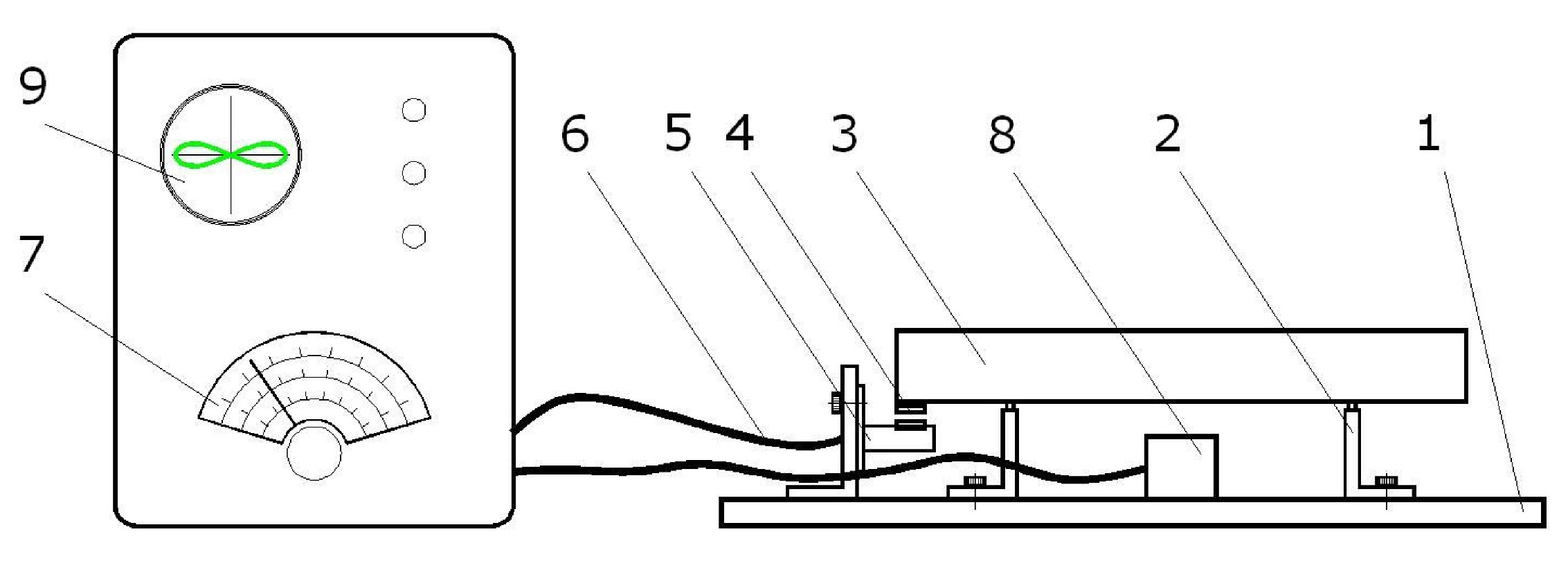
Рисунок – Схема прибора ИКВТ-2. Обозначения в тексте
Подбирая частоту колебаний, добиваются резонансного колебания образца, при котором возрастает сопротивление датчика (5), в магнитном поле, где находится пластина (4). О достижении резонансной частоты колебаний судят по характеру движения луча на экране осциллографа (9).
После определения значения резонансной частоты колебаний образца прямоугольного сечения, динамический модуль упругости рассчитывают по формуле [2]
Ед =0,965·10-6·(l/b)3·((P·f2)/a)·T,
где l, b, a – соответственно длина, высота, ширина образца, см;
Р – масса образца, г;
f – резонансная частота колебаний изгиба, Гц;
Т – коэффициент, учитывающий размер образца (Т = 1,07-1,2);
0,965·10-6 – коэффициент, учитывающий основной вид колебаний образца и размерность выбранных единиц измерений.
Нами был проведён эксперимент по исследованию возможности замены прибора ИКВТ-2 персональным компьютером для определения динамического модуля упругости [4]. Частота колебаний сигнала (в диапазоне 50…10000 Гц) выдаваемой звуковой платой на электродинамическую головку (8) регулировалась с помощью специальной программы.
В предварительном эксперименте для регистрации резонансного режима колебания образца использовался микрофон, установленный в соприкосновение с поверхностью стальной пластины (4). При достижении резонанса, воздействие образца на микрофон многократно превышало воздействие звука, излучаемого электродинамической головкой, что регистрировалось визуально на мониторе компьютера.
Заключение
Сопоставление данных, полученных с помощью описанной методики и с помощью прибора ИКВТ-2, свидетельствует о достаточно высокой сходимости результатов. Дальнейшее совершенствование методики должно быть направлено на получение возможности с помощью компьютера снятия показания с электромагнитного датчика, а также создания программы, позволяющей в автоматическом режиме производить все измерения и вычисления.
Библиографический список
- Невилль А. М. Свойства бетона. М.: Издательство литературы по строительству. 1972. 344 с.
- ГОСТ 10060-2012 Бетоны. Методы определения морозостойкости
- Демьянова В.С., Макридин Н.И., Калашников В.И., Марусенцев В.Я. Лабораторный практикум по курсу “Технология бетона, строительных изделий и конструкций”. – Пенза: ПГАСА, 2001. – 184 с.
- Осколков К.Ю., Коровкин М.О. Применение персонального компьютера для измерения динамического модуля упругости // Теория и практика повышения эффективности строительных материалов: Материалы II Всероссийской конференции студентов, аспирантов и молодых ученых Пенза: ПГУАС. 2007. С. 266-268.