

Введение
В наше время робототехника является одним из важнейших направлений развития науки и техники. Возможности роботов постоянно расширяются, как и сфера их применения. Одной из областей робототехники является направление подвижных автоматизированных платформ. Именно такой класс устройств в скором времени будет готов решать задачи в сферах сельского, лесного и водного хозяйства. В то же время, роботизированных платформ, способных нести оборудование массой до 80 – 100 кг производится крайне мало, а их возможности существенно ограничены. Подавляющее большинство территории России и Республики Карелия в частности остаётся неосвоенной. По этой причине, роботизированные платформы высокой проходимости будут востребованы в ближайшее время, и потребность в них будет постоянно возрастать.
Основой большинства подвижных роботизированных комплексов является некоторая колёсная или гусеничная платформа. Как правило, платформы, рассчитанные на перевозку большой массы, имеют в своём составе собственно механическую часть (рама, ходовая часть, рулевое управление), а также некоторое управляющее устройство, способное принять сигнал от оператора и через систему исполнительных механизмов сгенерировать выходное воздействие, приводящее к исполнению той или иной функции робота.
Таким образом, в данном исследовании рассматривается один из способов организации системы управления мобильной роботизированной платформы. В качестве основы роботизированной платформы выступает компактный квадроцикл с электрическим приводным двигателем, способный перевозить грузы массой до 80 кг.
Система управления
Разрабатываемая на кафедрах информационно-измерительных систем и физической электроники и механизации сельскохозяйственного производства Петрозаводского государственного университета система управления опытного образца мобильной роботизированной платформы грузоподъёмностью до 80 кг для передвижения по пересечённой местности включает в себя:
- управляющую плату на основе микроконтроллера AtMega2560 фирмы Atmel [1];
- комплект, включающий операторский пульт и радиоприёмник [2];
- механизм вращения рулевого вала;
- систему управления электрическим двигателем роботизированной платформы.
Общая структура системы представлена на рисунке 1.
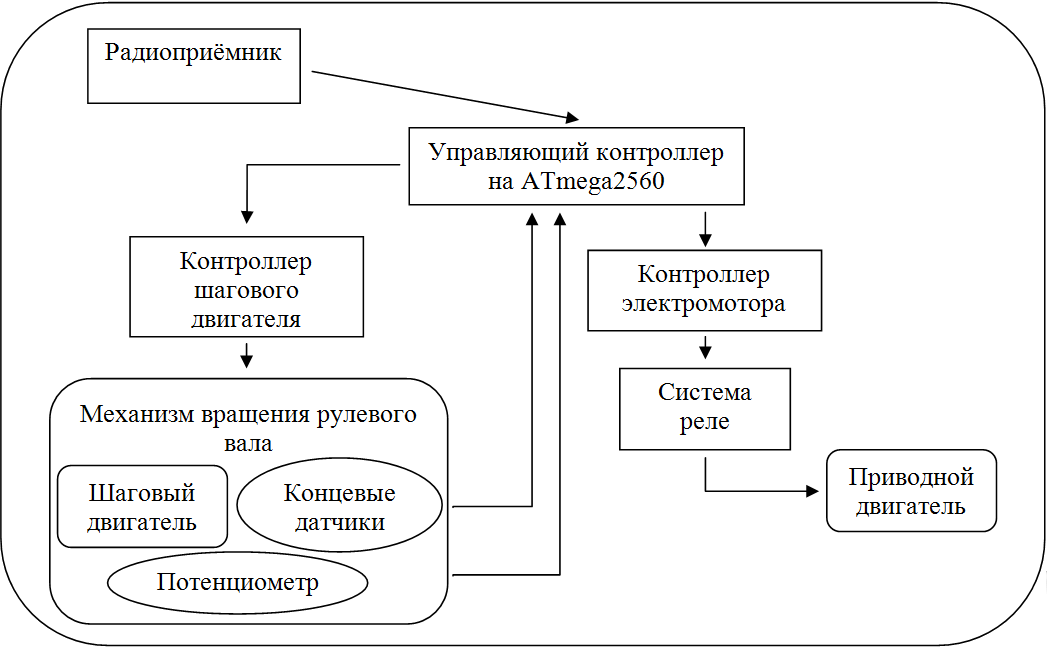
- Рисунок 1. Структура системы управления мобильной роботизированной платформой
Схема управления выглядит следующим образом. На вход управляющего контроллера по каналу радиосвязи поступает сигнал от оператора платформы. В результате декодирования сигнала определяется угол, на который необходимо повернуть рулевой вал, а также направление и скорость движения платформы.
Анализ радиосигнала осуществляется следующим образом. Операторский пульт имеет две основные ручки: ручка управления газом находится справа, а поворотом – слева. Перемещение правой ручки приводит к изменению сигнала, подаваемого в канал управления газом, а левой, соответственно, в канал управления рулевым валом. Способ передачи сигнала от пульта к радиоприёмнику может отличаться, однако на выходе применяется формат широтно-импульсной модуляции управляющего воздействия [3]. Ручки пульта, отвечающие за эти каналы, приведены в центральное положение, таким образом колеса направлены вперед и уровень газа равен нулю.
Механизм вращения рулевого вала реализован с использованием шагового двигателя ST57-76 с цилиндрическим редуктором 10:1 и ременной передачи, связывающей рулевой вал с шаговым двигателем. Ремень закреплён на шкивах с соотношением диаметров 1:4. Таким образом достигается необходимое усилие при вращении колёс в неподвижном состоянии платформы. Для того чтобы определить текущее положение вала используется значение количества шагов выполненное двигателем от момента включения системы управления. При включении этой системы происходит калибровка рулевого управления: двигатель вращает вал до касания одного из концевых датчиков, после этого изменяется направление вращения вала и фиксируется количество шагов двигателя до касания другого концевого датчика. Полученное значение делится пополам. Результат деления соответствует прямолинейному направлению движения. Кроме того, значение угла можно корректировать на основе показаний потенциометрического датчика, в случае, когда по каким-либо причинам мотор-редуктор пропускает шаги.
Система управления электрическим двигателем роботизированной платформы включает в себя контроллер двигателя YK31C и набор реле GDH4023DD3 [4], позволяющий переключать направление течения тока через ротор электродвигателя. Реле коммутируют обмотки двигателя по команде оператора.
Алгоритм разработанного программного обеспечения для управляющего контроллера на основе AtMega2560 следующий. При включении платы управления осуществляется тарировка положения рулевого вала, затем программа переходит в бесконечный цикл. При этом системный таймер платы управления раз в 50 мс опрашивает состояние каналов управления на наличие или изменение управляющего сигнала от оператора. По показаниям радиоприёмника определяется желаемый угол рулевого вала, а также направление и скорость движения платформы, после чего рассчитывается количество шагов и направление вращения мотор-редуктора. Одновременно в контроллер электромотора подаётся новое значение скорости движения, а направление движения задаётся комбинацией реле.
Заключение
В результате проведённых испытаний система подтвердила свою работоспособность, что проявляется в достаточной скорости реакции на изменение сигнала от оператора, как в канале газа, так и в канале управления рулевым валом.
Работа выполнена в рамках проекта «Разработка опытного образца мобильной роботизированной платформы грузоподъёмностью до 80 кг для передвижения по пересечённой местности» программы стратегического развития ПетрГУ на 2012-2016 гг.
Библиографический список
- ATMEGA2560: 8-bit Microcontroller with 250-Kbytes self-programming Flash Program Memory. Datasheet. [Электронный ресурс]. URL: http://www.atmel.com/Images/doc2549.pdf (дата обращения: 5.10.2015)
- Turnigy 6X FHSS 2.4ghz Transmitter and Receiver (Mode 2) [Электронный ресурс]. URL: http://hobbyking.com/hobbyking/store/__24969__Turnigy_6X_FHSS_2_4ghz_Transmitter_and_Receiver_Mode_2_.html (дата обращения: 10.10.2015).
- PWM_Generation. [Электронный ресурс]. URL: https://code.google.com/p/multiwii/wiki/PWM_Generation (дата обращения: 20.10.2015).
- GDH4023DD3 Реле твердотельное. [Электронный ресурс]. URL: http://www.rustenergo.ru/catalog/1785/23994/ (дата обращения: 22.10.2015).