

Введение
Одной из главных задач в мобильной подвижной робототехнике является проблема обнаружения препятствий как неподвижных, так и движущихся. Решение такой задачи открывает пути к разработке систем маршрутизации роботов. Как правило, для передвижения по известному маршруту используются системы глобального позиционирования. Однако такой способ не всегда достаточно надёжен, поскольку имеет значительную погрешность по отношению к размерам самого робота, а в закрытых помещениях и вовсе может не работать. Для уточнения положения робота относительно других объектов используются в основном системы технического зрения в оптическом диапазоне на основе стандартных видеокамер и видеокамер, работающих в инфракрасной части спектра [1, 2]. Системы технического зрения позволяют получить больше информации об окружающих объектах, но в определённых условиях вполне достаточно знать лишь о присутствии того или иного предмета на пути движения робота. В таких ситуациях способом решения проблемы относительного позиционирования является использование датчиков разной физической природы.
В данной работе представлена разрабатываемая система определения препятствий на основе ультразвуковых датчиков для мобильной роботизированной платформы грузоподъёмностью до 80 кг для передвижения по пересечённой местности.
Система обнаружения препятствий
Разрабатываемая на кафедре информационно-измерительных систем и физической электроники Петрозаводского государственного университета система обнаружения препятствий для мультикоптера [3] использовалась в качестве основы при подготовке такого рода системы для наземного мобильного робота. Для этого в систему обнаружения препятствий был внесён ряд изменений, обусловленный снижением требований к массогабаритным показателям и ужесточением таковых вследствие увеличения числа ультразвуковых датчиков.
Система состоит из:
- управляющей платы Flymaple v1.1 на основе микроконтроллера STM32F103RET6 фирмы STMicroelectronics [4];
- комплекта ультразвуковых датчиков расстояния [5].
Общая схема работы системы изображена на рисунке 1.
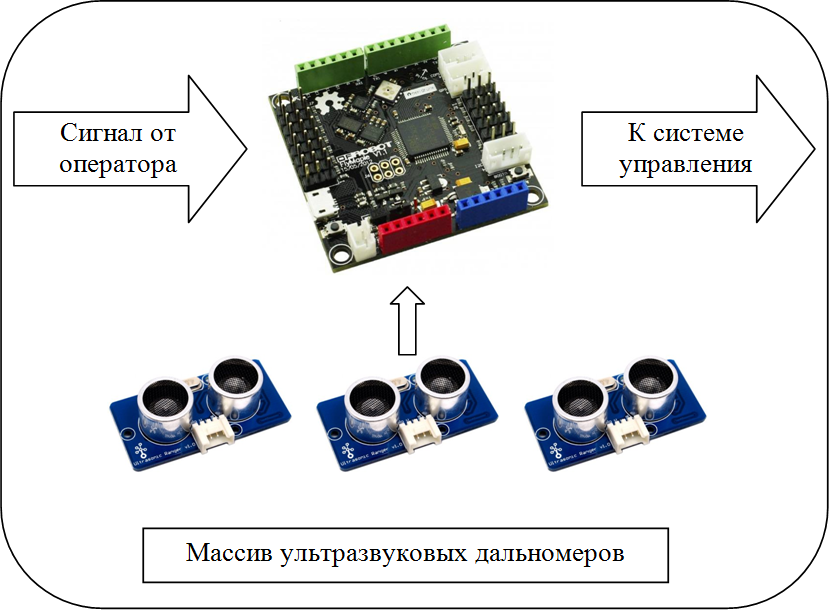 Рисунок 1. Схема работы системы обнаружения препятствий для мобильной роботизированной платформы
Рисунок 1. Схема работы системы обнаружения препятствий для мобильной роботизированной платформы
Для оценки окружающего пространства используется набор ультразвуковых датчиков. Дальномеры закрепляются на платформе, так чтобы перекрывать область передней и задней полусфер. Основной подход состоит в том, чтобы корректировать управляющее воздействие оператора платформы на основе информации о расстоянии до окружающих объектов. Для этого постоянно осуществляется измерение расстояния до окружающих объектов, а затем по мере необходимости в канал управления роботизированной платформой вносится корректирующий сигнал.
Результаты
Программное обеспечение для микроконтроллерной платы Flymaple v1.1 разработано в среде программирования CooCox CoIDE [6] и реализует следующие функции:
- перехват и фиксация параметров управляющего сигнала от оператора;
- измерение расстояний с помощью ультразвуковых датчиков;
- формирование управляющего сигнала для платы управления мобильной роботизированной платформой, провоцирующего остановку или движение платформы в сторону от препятствия.
Алгоритм работы программного обеспечения для управляющего контроллера на основе STM32F103RET6 выглядит следующим образом. Системный таймер платы Flymaple v1.1 раз в 20 мс осуществляет запуск процедуры захвата управляющего сигнала в двух каналах. Для этого используется система внешних прерываний микроконтроллера STM32F103RET6. Кроме того, одновременно запускается процесс измерения расстояния с помощью ультразвуковых дальномеров. После того как будет получена информация со всех дальномеров, осуществляется процедура сравнения результатов, и в случае обнаружения объекта в направлении движения на расстоянии меньше заданного, плата Flymaple v1.1 подаёт корректирующий сигнал плате управления роботизированной платформой. При этом управляющий сигнал от оператора не учитывается. Робот корректирует своё движение или останавливается, после чего сигнал от оператора снова беспрепятственно передаётся в контур управления.
Расстояния до объектов в пространстве, полученные в результате измерений, сохраняются в отдельном буфере и могут быть переданы оператору с помощью средств телеметрии.
Заключение
В результате тестирования и отладки системы обнаружения препятствий при движении вдоль основных направлений подтверждена общая корректность выходного управляющего сигнала. Поведение роботизированной платформы соответствует ожидаемой безопасной реакции на наличие ограниченных или непреодолимых препятствий.
Отметим, что разработанная система может быть интегрирована в системы технического зрения на основе видеокамер. А подходы, использованные при её разработке, планируется использовать в проекте по созданию робота-гида для Петрозаводского государственного университета [7].
Работа выполнена в рамках проекта «Разработка опытного образца мобильной роботизированной платформы грузоподъёмностью до 80 кг для передвижения по пересечённой местности» программы стратегического развития ПетрГУ на 2012-2016 гг.
Библиографический список
- Соколов С. М., Платонов А. К., Богуславский А. А. Бесконтактная одометрия в составе бортовых навигационных систем // Известия Южного федерального университета. Технические науки. 2010. Т. 104. № 3. [Электронный ресурс]. URL: http://cyberleninka.ru/article/n/beskontaktnaya-odometriya-v-sostave-bortovyh-navigatsionnyh-sistem (дата обращения: 10.11.2015).
- Кий К. И., Серединский М. В.. Система технического зрения робота «Амур» для движения на ориентиры // Труды международной научно-технической конференции «Экстремальная робототехника». – СПб: Изд-во «Политехника-сервис». – 416 с.
- Гоноболев А.С., Когочев А.Ю., Лекарев А.О. Система обнаружения препятствий для мультикоптера // Resources and Technology. 2014. Т. 11. № 2 [Электронный ресурс]. URL: http://rt.petrsu.ru/files/pdf/2902.pdf (дата обращения: 10.12.2015).
- Flymaple V1.1 (SKU:DFR0188). [Электронный ресурс]. URL: http://www.dfrobot.com/wiki/index.php?title=Flymaple_V1.1(SKU:DFR0188) (дата обращения: 11.12.2015).
- Grove – Ultrasonic Ranger. [Электронный ресурс]. URL: http://www.seeedstudio.com/depot/Grove-Ultrasonic-Ranger-p-960.html?cPath=25_31 (дата обращения: 11.12.2014).
- CooCox Free/open ARM Cortex-M Development Tool-chain. [Электронный ресурс]. URL: http://www.coocox.org/software/coide.php (дата обращения: 12.12.2015).
- Щеголева Л. В., Когочев А. Ю. Подходы к построению робота-гида // Научные исследования: от теории к практике : материалы V Междунар. науч.-практ. конф. (Чебоксары, 06 нояб. 2015 г.) / редкол.: О. Н. Широков [и др.]. – Чебоксары: ЦНС «Интерактив плюс», 2015. – № 4 (5). – С. – ISSN 2413-3957. Режим доступа: https://interactive-plus.ru/e-articles/196/Action196-13464.pdf