

Работа гидропривода погрузочных манипуляторов с гидродвигателем возвратно – поступательного действия характеризуется резким изменением гидравлических и кинематических параметров из-за реверсирования направления движения потока жидкости в гидродвигателе золотником, а также изменением внешних условий нагружения штока гидроцилиндра.
Для снижения динамических нагрузок в гидросистеме могут применяться различные демпферные устройства (рис.1). Устройство (рис. 1) представляет собой комбинированный демпфер, объединяющий принцип действия пружинного аккумулятора и гидравлического дросселя и состоит из стакана 1, внутри которого установлен поршень 2 с возможностью перемещения по направляющей 3, которая выполнена как единое целое с крышкой. Поршень поджат пружиной 4 к торцевой гайке 5 с дроссельными отверстиями. В крышке направляющей 3 для перепуска воздуха выполнено дроссельное отверстие 6 [1].
Такое устройство позволяет не только гасить гидроудары, но и снижать колебания давления в гидромагистралях.
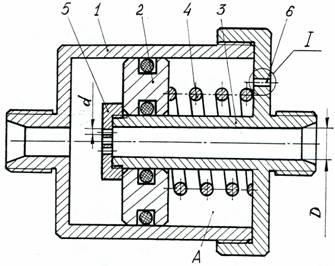 Рисунок 1 – Демпферное устройство для гашения гидроударов и снижения колебаний давления
Рисунок 1 – Демпферное устройство для гашения гидроударов и снижения колебаний давления
Демпфирование может быть применено не только в элементах, испытывающих наибольшие колебания, но и на пути распространения энергии между элементами. Место установки упругодемпфирующих элементов должно быть обосновано не только с точки зрения колеблющихся масс, но и с учетом операций, выполняемых гидравлической машиной или агрегатом, условий работы и т.п..
Из анализа применяемых средств гашение колебаний в напорной магистрали гидропривода следует, что решение актуальной задачи повышения плавности работы и снижения динамических нагрузок в гидроприводах погрузчиков может быть достигнуто за счет введения простых по устройству упругодемпфирующих связей в систему «энергетическая установка – исполнительный гидроцилиндр» [2, 3, 4].
Для динамического исследования демпферного устройства в гидроприводе погрузчика составим математическую модель и сформулируем основные допущения, принятые при составлении расчетной схемы (рис.2) и математической модели гидропривода рукояти погрузочного манипулятора:
- массу рукояти, приведенной к штоку, считаем постоянной, так как по сравнению
- насос постоянной, линейно зависящей от давления производительности с постоянной частотой вращения;
- температурный режим работы гидросистемы установившийся;
- вязкие потери на поршне и гидравлические потери в гидродвигателе линейно зависят от скорости движения поршня;
- гидравлические потери на трение в трубопроводах учитываются как линейно зависящие от скорости жидкости;
- гидросистема симметрична относительно гидродвигателя.
Перемещение золотника гидрораспределителя в большей части расчетов будем принимать как мгновенное, иначе говоря – режим работы золотника скачкообразный.
 Рисунок 2. Расчетная схема исполнительного гидропривода при внешнем демпферном устройстве в напорной магистрали
Рисунок 2. Расчетная схема исполнительного гидропривода при внешнем демпферном устройстве в напорной магистрали
Для составления дифференциальных уравнений движения приведенной массы используются уравнения равновесия сил на поршне, уравнения расходов и сохранения неразрывности потока рабочей жидкости.
Введем условные обозначения в расчетной схеме:
N – усилие на штоке;
m – приведенная к поршню масса подвижных частей;
x – перемещение штока;
pп, pшт – давления в поршневой и штоковой полостях гидроцилиндра;
pн – давление, развиваемое насосом;
Qп, Qшт – расходы рабочей жидкости через дроссели в поршневой и штоковой полостях;
Qзол – расход через щель золотника гидрораспределителя;
Qн – объемная подача насоса;
Qкл – расход жидкости через предохранительный клапан;
Qсл – расход жидкости через сливную магистраль;
Fп, Fшт- эффективные площади сечения поршневой и штоковой полостей;
y – перемещение золотника;
h – коэффициент вязкого трения;
c1, c2 – коэффициенты жесткости днища и крышки гидроцилиндра;
Математическая модель гидропривода для одного гидроцилиндра состоит из системы дифференциальных и линейных уравнений и имеет вид:
уравнение движения
 , (1)
, (1)
Движение поршня в гидроцилиндре может быть ограничено упором его в крышку или дно. При этом возникает упругий удар при наличии местных деформаций. Обозначив Pi = piFiопределим граничные условия, которые будут иметь вид:
Pп – c2×x, если x³lц;
Pшт – c1×x, если x£ 0.
Уравнения расходов через дроссели при нагнетании в поршневую или штоковую полость
 (2)
(2)
 (3)
(3)
Во всех уравнениях верхний знак означает нагнетание в поршневую полость, нижний – в штоковую, знак перед усилием на штоке N может принимать различное значение в зависимости от направления силы.
Уравнение расхода через щель золотника
 (4)
(4)
Уравнение движения поршня дифференциального гидрозамка
 (5)
(5)
Уравнение расхода через дроссель демпфера
 (6)
(6)
Уравнение расхода насоса
 (7)
(7)
Уравнение неразрывности потока
Qп = Qн - Qкл- Qу, , (8)
где Qу = ку×рн - перетечки жидкости через уплотнения поршня, ку – коэффициент утечек.
Расходы через дроссели на входе и выходе из рабочих полостей гидроцилиндра:
 (9)
(9)
 (10)
(10)
 (11)
(11)
 (12)
(12)
где m – коэффициент расхода;
fдр1 ,fдр2- площади проходного сечения дросселей;
r – плотность рабочей жидкости;
pзол – давление на выходе из гидрораспределителя;
pсл- давление слива.
lдр – ширина дроссельного отверстия.
Силы трения в уплотнительных элементах поршней цилиндра и демпфера
Rтр = f×Fм×(±pп-pшт) (13)
Rтр1 = f×Fм×pн (14)
Коэффициенты упругости полостей с жидкостью



где ΔVп, ΔVшт – мертвые объемы соответственно поршневой и штоковой полостей;
lц- ход штока гидроцилиндра;
L- длина участка трубопровода;
Vн – рабочий объем насоса;
d -внутренний диаметр трубопровода или полости в которой замкнута жидкость;
Eпр - приведенный модуль упругости,
Еж - модуль упругости жидкости;
dст – толщина стенки трубопровода или гильзы цилиндра;
Fм - модуль упругости материала трубопровода или цилиндра.
Таким образом, в процессе анализа динамики гидропривода с одним гидроцилиндром и упруго – демпфирующими связями в напорной магистрали была получена математическая модель содержащая дифференциальные и линейные уравнения.
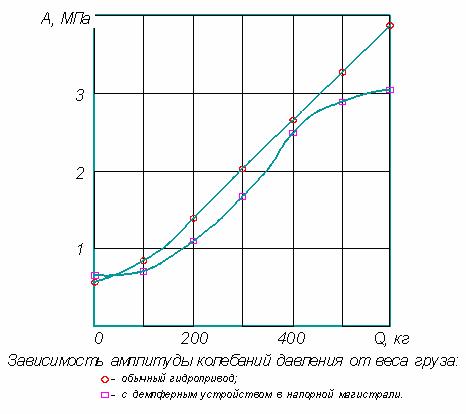
Решение математической модели численными методами на ЭВМ позволили подтвердить ранее выдвинутые гипотезы о снижении динамической нагруженности гидропривода погрузчика при введении в его гидросистему упругодемпфирующих связей [5]. Как видно из графика изменения давления в полости гидроцилиндра (рис.3, а), при одних и тех же условиях эксплуатации применение демпферного устройства позволяет уменьшить амплитуду скачков давления в гидросистеме. В среднем амплитуда колебаний давления снизилась на 250..350 кПа.
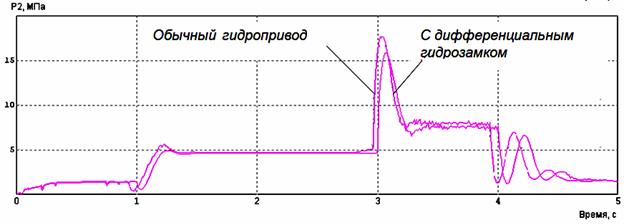 а)
а)
 б)
б)
Рисунок 3 –Изменения амплитуды давления в гидроприводе.
Библиографический список
- Патент РФ №2362916. Гидравлическая система. Несмиянов И.А., Хавронин В.П., Фомин С.Д., Хавронина В.Н. Опубл. 04.04.2008.
- Пындак, В.И. Расширение функциональных возможностей гидроманипуляционных систем. / Пындак В.И., Воробьева Н.С., Несмиянов И.А.// Известия Нижневолжского агроуниверситетского комплекса: Наука и высшее профессиональное образование. 2015. № 3 (39). С. 158-162.
- Токарев В.И., Курбанов Д.Б., Несмиянов И.А. Направления совершенствования погрузчиков сельскохозяйственного назначения // Современные научные исследования и инновации. 2012. № 3 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2012/03/10518
- Несмиянов, И.А. Эластичный привод гидронасоса как способ снижения энергопотребления гидромашин./ Несмиянов И.А., Хавронин В.П.// Тракторы и сельскохозяйственные машины. 2007. №6. С.45-46.
- Несмиянов, И.А. Улучшение динамических характеристик гидропривода погрузчика. /Несмиянов И.А., Лапынин Ю.Г.// Тракторы и сельскохозяйственные машины. 2001. №6. С.36-37.