

Как известно, сегодня экологические научные исследования, инженерно-изыскательские и т.п. работы ведутся в разные времена года и в разных местностях, отличающихся друг от друга доступностью, составом и консистенцией грунтов, степенью заболоченности и заснеженности. Для производства работ на сильно заболоченных или заснеженных территориях обычно применяются специальные машины типа снегоболотоходов, оснащенных устройствами для взятия проб грунта, воды и газов, определения уровня радиации и пр.
Управляются современные снегоболотоходы, как правило, водителем-оператором, размещающимся в кабине машины и наблюдающим за её движением либо непосредственно через окна, либо с помощью перископических или телевизионных систем. Но человек должен чувствовать себя в кабине комфортно, а это требует применения особых технических средств, зачастую существенно увеличивающих массу снегоболотохода, мощность его приводов и габаритные размеры, что как следствие еще и снижает его маневренность.
Для ликвидации указанных недостатков, очевидно, целесообразно вывести оператора за пределы машины, связать его с ней с помощью системы телеуправления, а для управления её приводами использовать автоматические устройства. В результате получится автоматизированная система управления снегоболотоходом, а сам он – малогабаритным. Если при этом ещё поставить задачу построения не просто снегоболотохода малых габаритов, но машины высокой проходимости, то в качестве его движителей имеет смысл применить мотор-спирали.
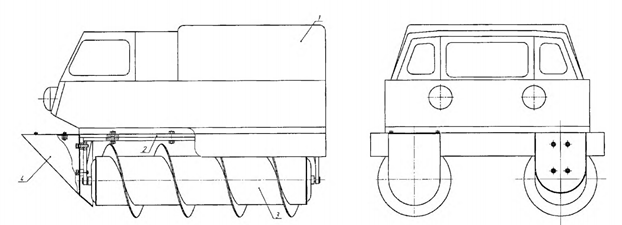
Рис. 1 Малогабаритный снегоболотоход со шнековыми движителями, предложенными в работах [1; 2, с. 166-169]
Один из конструктивных вариантов малогабаритного снегоболотохода на мотор-спиралях, разработанного на кафедре «Подъемно-транспортные машины и роботы» Уральского Федерального Университета, показан на рис.1, где 1 -корпус машины, с установленными на нем аккумуляторами, буровым агрегатом телескопического типа, водозаборным устройством, прибором для анализа грунта и воды, газоанализатором, счетчиком Гейгера, аппаратурой управления и др.; 2 – опорная рама, на которой закреплен корпус 1 и движители 3, выполненные на велосипедных мотор-колесах, 4 – носовые ограждения машины.
Особенностью данной конструкции является простая жесткая подвеска движителей. Это повышает надежность машины, но при резких динамических нагрузках на движители может отрицательно сказаться на работе агрегатов, находящихся в корпусе. Если указанные нагрузки весьма вероятны, то жесткая подвеска может быть заменена упругой.
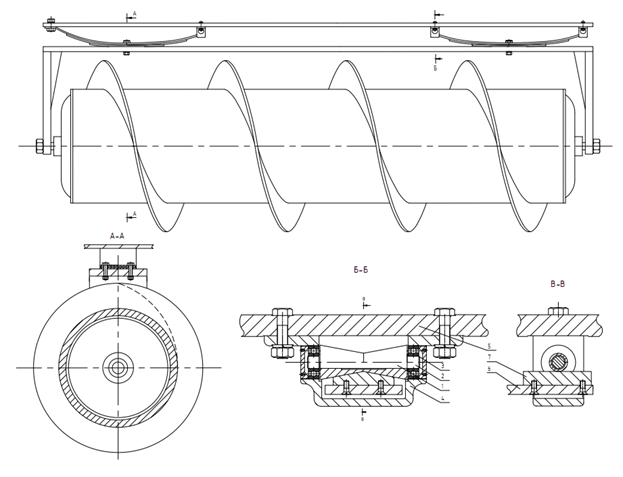
Рис. 2 Шнековый движитель с рессорной подвеской
Разработаны три варианта упругой подвески движителей: рессорная (рис.2), пружинная (рис.3) и торсионная (рис.4). Последняя обладает наибольшей упругостью, предпоследняя – средней, первая – наименьшей. Принципиально все три варианта аналогичны упругим подвескам, используемым в других транспортных машинах [3, с. 241-256], но выполнены с некоторыми отличиями. Так, рессорная подвеска сконструирована не с применением серьги, связывающей подвижный конец рессоры с опорной рамой, как делается обычно [4, с. 564-567], а с применением опорного ролика.
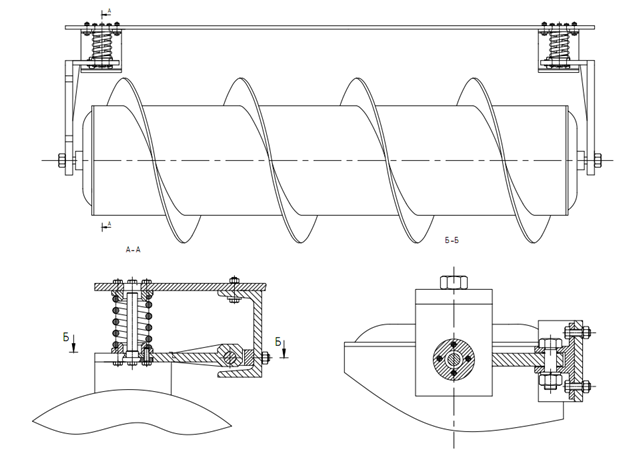
Рис.3 Шнековый движитель с пружинной подвеской
Ролик 1 (рис.2) имеет геометрическую форму двух конусов, обращенных меньшими диаметрами друг к другу, что создает на его поверхности соответствующее углубление. Ось 2 ролика закреплена на подшипниках 3 в кронштейне 4, который установлен на опорной раме 5 снегоболотохода. Подвижный конец рессоры 6 снабжен накладкой 7, имеющей профиль, ответный по отношению к углублению ролика, и размещен внутри кронштейна под роликом. Такая конструкция более износостойка, чем конструкция с серьгой, и более долговечна. В целом же все три варианта упругой подвески способны повысить и догловечность
снегоболотохода при резких динамических нагрузках на его движетели, и его проходимость.
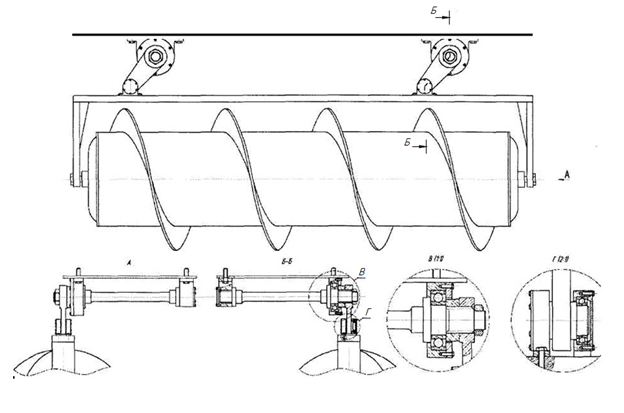
Рис.4. Шнековый движитель с торсионным валом
Библиографический список
- Либерман Я.Л., Захарова Н.А. Шнековый движитель/ Патент РФ №167625 от 10.01.17.
- Либерман Я.Л., Летнев К.Ю Специальные системы управления транспортирующими машинами: новые схемы и конструктивные элементы. Saar-
briicken: LAP LAMBERT Academie Pablishing, 2017. - Багин Ю.И., Ильин А.В., Автомобили. Конструкция и элементы расчета шасси. Екатеринбург: УГТУ-УПИ, 2008.
- Добровольский В.А., Заблонский К.И., Мак С.Л., Радчик А.С., Эрлих Л.Б. Детали машин. К.-М.: Машиностроение, 1959.