

Введение
Искусственная инкубация – это технология, которая имеет очень долгую историю и играет важнейшую роль в промышленном птицеводстве. Под действием температуры и других климатических факторов эмбрион внутри яйца развивается из одной клетки до практически сформировавшегося организма. Основное отличие искусственной инкубации от естественной заключается в том, что теплообмен осуществляется не контактным способом, а с помощью конвекции и излучения от нагревателя.
Подбор оптимальных климатических условий для инкубации яиц разных пород птиц – отдельная область исследований [1,2,3,4]. Тем не менее, установлено, что ключевыми факторами являются: температура, влажность, вентиляция и переворот яиц в процессе инкубации. Оптимальный режим инкубации для куриных яиц достигается при температуре 37,5 °C, влажности 60 %, достаточной вентиляции для поддержания процентного содержания кислорода не менее 20 % и углекислого газа не более 0,5 %. Применяются также специфические условия, заключающиеся в кратковременном охлаждении яиц, опрыскивании водой, изменения температуры инкубации согласно заданному профилю.
В настоящей работе обсуждается частная техническая задача разработки терморегулятора для малогабаритного инкубатора. Большинство источников (например, [1,3]) содержат следующие рекомендации по поддержанию температуры:
- точность регулирования – не менее 0,5 °C, оптимальным является 0,2 °C;
- как можно более быстрый выход на установленный температурный режим;
- отсутствие перерегулирования – превышения температуры над заданным значением при переходных процессах.
Если точность регулирования в большей степени зависит от применяемого датчика температуры и способа измерения, то два последних требования относятся к динамическому поведению терморегулятора и, в действительности, противоречат друг другу. Поэтому оптимальная настройка регулятора является не менее важным фактором нормальной работы инкубатора.
В отечественной научной и технической литературе этот вопрос обсуждался лишь фрагментарно. Достаточно полное исследование проведено в диссертационной работе [5], в частности, рассмотрена динамика инкубационной камеры [6] и терморегулятор [7]. Однако, вопрос автоматической настройки цифрового терморегулятора не был проработан в должной мере. В технической литературе, например в [8,9], автоматическая настройка также не реализовывалась. Отсюда, решаемая задача имеет достаточно актуальное прикладное значение.
Структура системы регулирования температуры
Схематично структура системы показана на рисунке 1. Установка состоит из камеры инкубации с нагревателем (предположительно, лампа накаливания), симисторного регулятора мощности с фазовым управлением, ПИД-регулятора, термодатчика и формирователя сигнала ошибки , где
– температура воздуха в инкубаторе,
– уставка температуры.
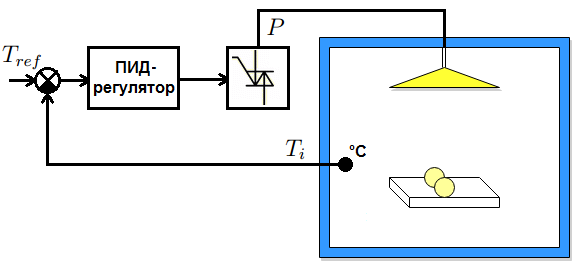
Рисунок 1. Структурная схемы системы регулирования температуры.
Динамическая модель
Для моделирования динамических процессов теплообмена можно составить модель с сосредоточенными параметрами, состоящую из следующих элементов (рисунок 1): нагреватель, воздушная среда в камере инкубатора, лоток с яйцами, стенки инкубатора и внешняя среда.
Обозначим следующие параметры: – температура окружающей среды,
– тепловой поток через стенки инкубатора,
– температура воздуха в камере инкубатора,
– тепловой поток от нагревателя к воздуху,
– температура лотка,
– тепловой поток от воздуха к лотку,
– мощность нагревателя.
Для получения динамической модели процесса применим метод электротепловой аналогии. Введем в рассмотрение следующие величины, характеризующие тепловые свойства составляющих модели:
- , где:
– масса воздуха в камере,
– удельная теплоемкость воздуха;
- , где:
– масса лотка с яйцами,
– удельная теплоемкость лотка (усредненная);
- – тепловое сопротивление контакта воздух-яйцо;
- , где
– площадь поверхности камеры инкубатора,
– коэффициент теплопроводности через стенки корпуса.
Используя введенные параметры, можно составить схему тепловой цепи (рисунок 2), которая отражает тепловые процессы в системе. Тепло от нагревателя передается окружающему воздуху (тепловой поток ), имеющему тепловую емкость
, а также выходит наружу (тепловой поток
) через тепловое сопротивление
. Нагретый воздух отдает тепло (тепловой поток
) лотку с тепловой емкостью
, через сопротивление
.
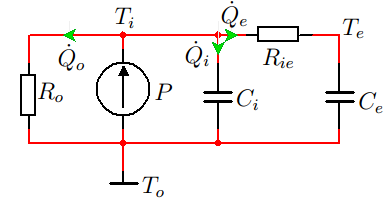
Рисунок 2. Эквивалентная схема тепловой цепи.
Можно записать следующие уравнения, моделирующие данный процесс:
После некоторых преобразований, получаем следующую передаточную функцию системы по отношению к температуре воздуха :
где – оператор Лапласа.
Эта передаточная функция получена при нулевых начальных значениях температур. Температура воздуха в камере инкубатора с учетом начальных условий определяется следующим образом:
Синтез регулятора
Поскольку полученная модель второго порядка строго апериодическая, то для реализации регулятора имеет смысл аппроксимировать ее передаточной функцией первого порядка:
Из соображений равенства установившихся значений, получаем .
Для вычисления преобразуем знаменатель
к стандартному виду:
где
Тогда постоянная времени может быть оценена следующим образом:
Поскольку управление системой первого порядка может быть реализовано без использования дифференциальной компоненты регулятора, то в этой частной задаче возможно применение ПИ-регулятора, передаточная функция которого записывается в виде:
Передаточная функция все системы с замкнутой обратной связью, образованной регулятором и объектом управления
, выражается так:
Коэффициенты ПИ-регулятора должны быть подобраны таким образом, чтобы обеспечить равенство знаменателя желаемому характеристическому уравнению , определяющему динамику системы в целом. Отсюда получается:
Для оптимальности переходных процессов (отсутствия перерегулирования и насыщения управляющего входа), имеет смысл выбрать параметры следующим образом:
Таким образом, зная постоянную времени и коэффициент передачи
объекта управления, получаем
регулятора.
Идентификация параметров модели
Задача ставится следующим образом: на основе эксперимента определить параметры объекта управления. В этом параграфе обозначим вход объекта управления
, который физически является мощностью нагревателя, и выход
, который выражает температуру в камере инкубатора. Предполагается, что до включения нагревателя температура всех частей системы равнялась температуре внешней среды
.
Подадим ступенчатое тестовое воздействие на вход объекта управления . Наблюдаемая реакция выхода запишется в виде:
(1)
Пусть – измеренный отклик объекта управления на ступенчатое воздействие
. Зададим вектор дискретных уровней выхода
, где
– фиксированный шаг. На основе вектора
можно определить вектор
такой, что
– минимальное значение времени, для которого выполняется
. Таким образом, вместо записи и хранения всего сигнала
определяется лишь вектор
моментов времени, когда
превышает заранее определенные фиксированные уровни.
В конце эксперимента, после установления постоянного значения на выходе объекта управления, зафиксируем измеренное установившееся значение: . Из уравнения (1) получается при
:
Для определения постоянной времени можно переписать (1) в виде
отсюда после логарифмирования
Подставляя значения из векторов и
, получаем
Обозначив выражение в правой части как вектор
тогда оценка может быть получена на основе линейной регрессии:
где – соответствующие средние значения,
– количество измерений в векторах
.
Линеаризация объекта управления по входу
Применение тиристорного (симисторного) регулятора мощности добавляет существенную нелинейность в систему. Известно [10], что мощность , выделяемая в нагрузке, зависит нелинейно от угла фазы
открытия симистора:
`
(2)
Можно предложить два способа реализации преобразования управляющего воздействия:
- положив грубо, , можно получить следующую линейную трансформацию:
(3)
при этом эффекты нелинейности будут скомпенсированы ПИ-регулятором как возмущения;
- использовать табличное инверсное соответствие такое, что
– мощность по (2) для заданного
.
Моделирование
Для проверки концепции была разработана модель системы с обратной связью в MATLAB/Simulink, собранная на основе блоков Simscape.
Начальная температура всех компонентов системы выбрана как °C (300 K). Рассматривалась кубическая камера инкубации габаритными размерами 1 м по всем измерениям. По условиям моделирования, в инкубаторе содержится 40 яиц, массой 50 г каждое и площадью 68 кв.см. В качестве остальных параметров модели выбраны следующие значения:
,
,
,
,
,
,
,
,
,
. Реакция системы на входное воздействие
Вт показана на рисунке 3. Точки
, выбранные в соответствии с описанным алгоритмом идентификации, выделены на рисунке красным.

Рисунок 3. Отклик системы на ступенчатое входное воздействие и точки для идентификации параметров модели.
В результате идентификации получены следующие параметры аппроксимации первого порядка: . Реакция системы первого порядка практически не отличается от исходной модели.
По соотношениям (0) были вычислены коэффициенты ПИ-регулятора: . Рассматривалось два варианта пересчета значения выхода ПИ-регулятора в угол открытия симистора: линейное преобразование (3) и полная инверсия
. Результаты моделирования показаны на рисунке 4, на котором показаны следующие кривые
– уставка температуры,
– температура в инкубаторе при применении преобразования (3),
– температура при применении инверсии (2), т.е. полной линеаризации модели. Как видно из полученных результатов, нелинейная инверсия (2) не дает преимуществ перед преобразованием (3), а поскольку (3) реализуется гораздо проще, поэтому с практической точки зрения такой вариант более предпочтителен.

Рисунок 4. Моделирование процесса регулирования температуры: сравнение линейного преобразования для зависимости фаза открытия тиристора-мощность и ее полной инверсии.
Заключение
В настоящей работе рассмотрены теоретические аспекты разработки интеллектуального терморегулятора для малогабаритного инкубатора. Разработка модель второго порядка для динамики температуры в камере инкубатора. Показано, что такая модель может быть упрощена до системы первого порядка. Разработан алгоритм идентификации параметров модели, на основе которых вычисляются коэффициенты ПИ-регулятора, что реализует его автоматическую настройку по результатам применения ступенчатого сигнала. Проведено моделирование системы с замкнутой обратной связью. На основе результатов моделирования показано, что линеаризация статической характеристики симисторного (тиристорного) регулятора мощности не требуется для обеспечения термостабилизации.
Дальнейшая работа будет сосредоточена на проведении натурных экспериментов, а также оптимизации предложенных алгоритмов для аппаратной реализации в микроконтроллере.
Библиографический список
- Molenaar R. et al. Meeting embryonic requirements of broilers throughout incubation: a review //Revista Brasileira de Ciencia Avicola. – 2010. – Т. 12. – №. 3. – С. 137-148.
- Cartwright A. L. Incubating and hatching eggs [Электронный ресурс] // Режим доступа: http://aggie-horticulture.tamu.edu/organic/files/2011/02/lee-cartwright-incubating-and-hatching-eggs.pdf – Загл. с экрана (дата обращения: 20.05.2014).
- Маковеева А. С., Лоретц О. Г. Сравнительный анализ выводимости цыплят-бройлеров отечественной и зарубежной селекции в условиях Среднего Урала // Молодежь и наука, 2013 год, №1
- Тагиров М.Т., Огурцова Н.С., Терещенко А.В. Аналіз проблем выводимости инкубируемых яиц // Птахівництво: Міжвід. темат. наук. зб. ІП УААН. – Бірки, 2008. – Вип. 63.
- Гветадзе С.В. Имитирующие элементы и управляющие устройства для обеспечения нестационарных температурных режимов инкубации: aвтореф. дис. на соиск. уч. степ. кандидата технических наук: 05.13.05 / ЮРГТУ (НПИ) – Новочеркасск, 2010.
- Гветадзе С.В. Исследование динамических свойств инкубационного шкафа как теплового объекта управления / С.В. Гветадзе, Е.И. Фандеев // Автоматизацiя технологiчних об’ектiв та процесiв. Пошук молодих: Зб. наук.праць. III-й Мiжнар. наук.-техн. конф. аспiрантiв i студентiв, 14-15.05. 2003 г. – Донецьк: ДонНТУ, 2003. –С. 75-76.
- Гветадзе С.В. Микропроцессорная система управления термоконтрастным режимом инкубации / С.В. Гветадзе, Е.И. Фандеев // Автоматизацiя технологiчних об’ектiв та процесiв. Пошук молодих: Зб. наук.праць. II-й Мiжнар. наук.-техн. конф. аспiрантiв та студентiв, 25-26 апр. 2002 г. –Донецьк: ДонНТУ, 2002. –С. 42-44.
- Борисевич А.В. Цифровое устройство управления инкубатором [Электронный ресурс] // Режим доступа: http://www.radioland.net.ua/sxemaid-341.html – Загл. с экрана (дата обращения: 20.05.2014).
- Филипович А.И. Блок автоматического управления инкубатором // Режим доступа: http://sokol.radioliga.com/15.htm – Загл. с экрана (дата обращения: 20.05.2014).
- Power Control with Thyristors and Triacs: Chapter 6 in Power Semiconductor Applications Philips Semiconductors // Режим доступа: http://www.nxp.com/documents/application_note/APPCHP6.pdf – Загл. с экрана (дата обращения: 20.05.2014).
- Инкубация яиц. Справочник. / Ю.З. Буртов, Ю.С. Голдин, И.П. Кривопишин М.: Агропромиздат, 1990. – 239 с.