Дутьевые вентиляторы нашли широкое применение в энергетике, как вытяжные и дутьевые устройства, для котлов средней и малой мощности. Дутьевые вентиляторы способны перемещать массы воздуха, газов различной температуры.
Система управления асинхронным двигателем должна обеспечивать максимальную экономию электроэнергии, иметь высокую надежность и приемлемую стоимость. Такие системы управления позволяют достигнуть высоких показателей требуемых технологических процессов.
Компьютерные технологии позволяют исследовать статические и динамические режимы работы электрических машин, их механические характеристики, условия пуска и технико-экономические показатели с получением количественных результатов.
Целью данной работы является разработка модели асинхронного короткозамкнутого электродвигателя, привода дутьевого вентилятора, разработанной в пакете Simulink программы МATLAB удовлетворяющей современным высоким технологическим требованиям.
Значения активных и реактивных сопротивлений обмоток статора и ротора соответственно R1, Ом, X1, Ом и R2‘, Ом, X2‘, Ом, а также значения реактивного сопротивления рассеяния Xμ, Ом рассчитываются с помощью программы ADpasport математического пакета MathCad, значения сопротивлений представлены ниже, в относительные единицах.
 о.е.;
о.е.;  о.е.;
о.е.;  о.е.;
о.е.;  о.е.;
о.е.; 
о.е.
Определяется общее сопротивление схемы замещения Zн, Ом с помощью формулы, представленной ниже.
 Ом,
Ом,
где Uнф – фазное сопротивление двигателя, В.
Рассчитываются сопротивления схемы замещения двигателя в Омах
Активное сопротивление статора R1* , Ом определяется с помощью выражения.
 Ом,
Ом,
Реактивное сопротивление статора X1*, Ом
определяется с помощью выражения
 Ом,
Ом,
Активное сопротивление ротора R2* , Ом определяется с помощью выражения
 Ом,
Ом,
Реактивное сопротивление ротора X2*, Ом
определяется с помощью выражения
 Ом,
Ом,
Реактивное сопротивление рассеяния Xμ*, Ом
определяется с помощью выражения
 Ом,
Ом,
Определяются индуктивности рассеяния обмоток двигателя.
Индуктивность рассеяния статора L1σ, Гн может быть найдена по формуле
 Гн,
Гн,
Индуктивность рассеяния ротора L2σ, Гн может быть найдена по формуле
 Гн,
Гн,
Взаимоиндуктивность рассеяния статора и ротора Lμ, Гн может быть найдена по формуле.
 Гн,
Гн,
Рассчитываются полные индуктивности обмоток.
Индуктивность статора L1, Гн определяется с помощью формулы
 Гн,
Гн,
Индуктивность ротора L2, Гн определяется по формуле
 Гн,
Гн,
Таблица 1: данные электродвигателя.
| Тип | P ном, кВт | n, об/мин | S н, % | Cos φ | кпд, % | К н | К max | К min | К i | U н, В |
| 5АМ250S4 | 75 | 1484 | 2,7/2,5 | 0,88 | 94.7 | 2,1 | 2,3 | 1,3 | 7,2 | 220 |
Кн =Мп / Мн
Кмах = Ммах / Мном
Кмin = Ммin / Мном
Кi – крат-ть пускового тока
Кном – ном. момент
Мп – пуск. момент
Ммах – максим. момент
Ммin – миним. момент
Определяем номинальный ток электродвигателя:

Номинальный момент эл. двигателя:


Паспортные значения мах. из пусковых моментов:








Таблица 2: номинальные данные электродвигателя.
| Напряжение статора | Uном = 220 В |
| Ток статора | Iном = 137,3 А |
| Пусковой ток статора | Iпуск = 988 А |
| Мощность на валу | Pн = 75кВт |
| Обороты | nном = 1484 об/мин |
| КПД | μ = 0,94 |
| Номинальный момент | Mном = 482 Нм |
| Минимальный момент | Mdvmin. = 626 Нм |
| Максимальная частота вращения | nmax. = 1500 об/мин |
| Число пар полюсов | P = 4 |
Определение мах. момента нагрузки на валу эл. двигателя:
Условия проверки эл. двигателя на перегрузки:

 – условие выполняется
– условие выполняется
Коэффициент снижения:
Тогда, мах. момент будет равен:



 - условие выполняется
- условие выполняется
Мах. ток двигателя при P=Pmax


На основании проделанных расчётов строим виртуальную модель АД.
Схема модели для исследования двигателя с короткозамкнутым ротором представлена на рисунке 1.
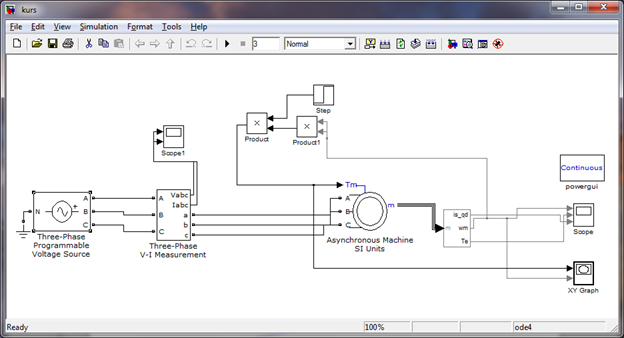
Рисунок 1 – Схема модели для исследования асинхронного двигателя с короткозамкнутым ротором.
Графический дисплей «wm, M=f(t), is_qd» отображает переходной процесс скорости и момента во времени, эквивалентный ток, представленный на рисунке 2.
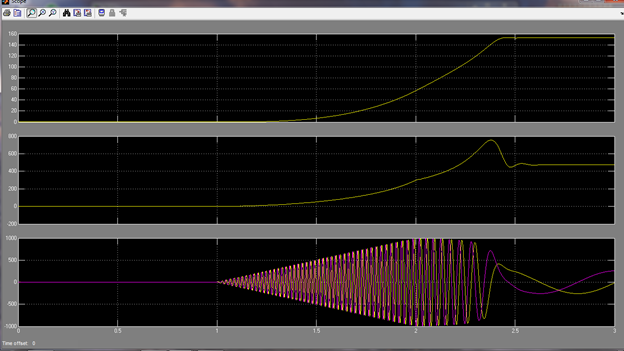
Рисунок 2. – Переходной процесс скорости и момента функции времени, эквивалентного тока при пуске и набросе нагрузки.
Аналогичная картина наблюдается при набросе нагрузки. Данные характеристики представлены на рисунках 2.1
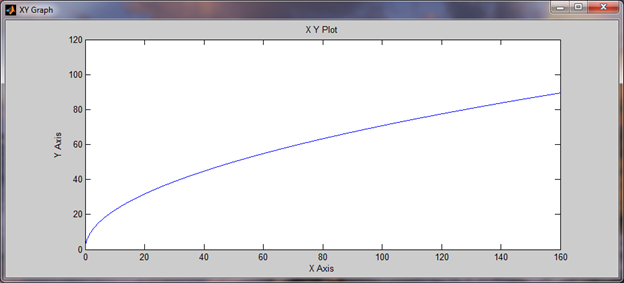
Рисунок 2.1 – Динамическая механическая характеристика при пуске и набросе нагрузки, построенная блоком «XY»
Графический дисплей «Va,b,c, Ia,b,c » отображает параметры сети, представленный на рисунке 2.2
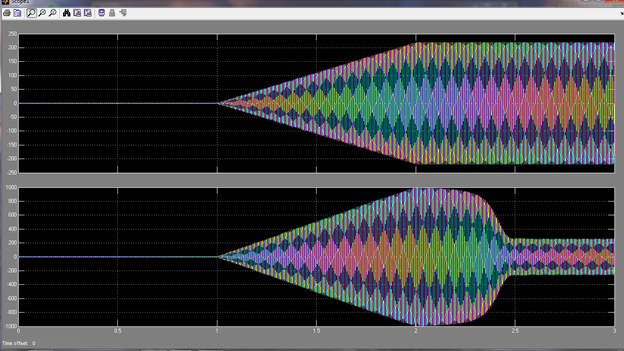
Рисунок 2.2 – Параметры сети.
Из выше приведённых графиков мы видим изменения энергетических характеристик во времени, это очень важно для анализа и улучшения в требуемых режимах. Видим долевые потери энергии на каждом участке системы.
Энергосбережение, увеличение производительности, повышение конкурентоспособности не возможно без применения современного комплектного автоматизированного электропривода.
Библиографический список
-
Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в Matlab 6.0: Учебное пособие. – СПб.: КОРОНА пинт. 2001.- 320с.
-
Терехов В.М. Система управления электроприводов. Учебник. / 2004. – 296 с.
-
Башарин А.В. Управление электроприводами: Учебное пособие для вузов 1982. – 392с.
Здравствуйте уважаемый автор! Очень рад, что нашел вашу статью! Мне нужна ваша помощь. В данный момент пишу дипломный проект. И нужно выполнить все расчеты по асинхронному двигателю. А у вас увидел, что вы при расчете пользовались программой ADpasport математического пакета MathCad. Все обыскался, не нашел эту программу. Она как-то отдельно идет от пакета mathcad?
если сможете, скиньте мне на нее ссылку сюда ermek260192@mail.ru
c.у. Ермек г. Омск