Для механизации погрузочно-разгрузочных работ в сельскохозяйственном производстве необходимы различные типы погрузчиков: фронтальные и с поворотной колонной. Широкое применение в сельскохозяйственном производстве нашли погрузчики с консольно-поворотной стрелой. Одной из важнейших характеристик погрузчика является зона обслуживании, увеличение которой во многом расширяет и возможности погрузочного средства.
Особенность предлагаемой кинематической схемы погрузчика [1] заключается в том, что введённый в механизм поворота колонны дополнительный гидроцилиндр увеличивает угол поворота стрелы в горизонтальной плоскости без глобальных перемещений самого погрузчика (рис.1).
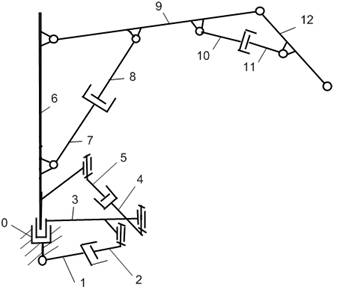
Рисунок 1 – Кинематическая схема погрузчика с последовательным соединением гидроцилиндров поворота колонны со стрелой.
На рис. 2 представлена структурная схема механизма поворота колонны погрузчика, для которого определим степень подвижности по формуле Чебышева:
W=3n-2p=3·6-2·8=2
где n=3 – число подвижных звеньев;
p=8 – число одноподвижных пар 5 класса.
Степень подвижности W=2 говорит о том, что положение выходного звена 6 (колонны) зависит от двух обобщённых координат l1 и l2. Механизм поворота колонны является механизмом с внутренними входами и не распадается на группы Ассура.
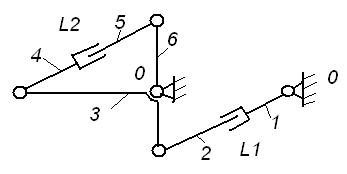
Рисунок 2 – Структурная схема механизма поворота колонны погрузчика.
С целью получения компактного и рационального по кинематическим параметрам механизма рассмотрим его возможные компоновки и решим задачу определения линейных размеров звеньев механизма с целью получения наибольшего угла φ поворота выходного звена.
Граф механизма поворота представлен на рис. 3, где вершины – это звенья, рёбра графа – одноподвижные кинематические пары.
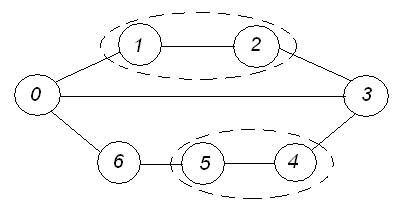
Рисунок 3 – Граф механизма поворота колонны
Опишем однозначные присоединения поводков кинематических пар, предварительно расчленив механизм (рис.2). Однозначно звено 3 присоединяется средним шарниром к стойке в точке О, туда же присоединяется поводок рычага 6.
Неоднозначные соединения: к стойке 0 можно присоединить как звено 1, так и 2, также как звено 1 или 2 тогда может присоединяться к звену 3. Аналогичная ситуация с присоединением звеньев 4 и 5 к стойке и рычагу 3.
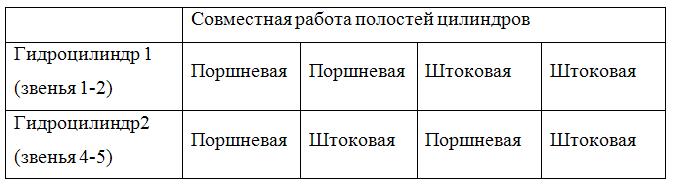
С точки зрения структуры механизма от таких неоднозначных соединений цилиндров к звеньям его работоспособность не изменяется, однако с точки зрения кинематики, скорости и ускорения звеньев будут при различных вариантах разные, и будут зависеть от плеч рычага 3 и угла δ между этими плечами. Включение в работу штоковой (Ш) или поршневой (П) полостей гидроцилиндров будут оказывать влияние на скорость движения выходных звеньев. Варианты возможных управляемых движений стрелы приведены в табл.1.
Таблица 1
Варианты совместной работы гидроцилиндров
 Угол поворота колонны зависит как от линейных размеров рычагов, так и от параметров исполнительных гидроцилиндров [2].
Угол поворота колонны зависит как от линейных размеров рычагов, так и от параметров исполнительных гидроцилиндров [2].
Для механизма поворота колонны с исполнительными гидроцилиндрами ЦГ-50.30х320.22 и для найденных в результате геометрического синтеза межосевого расстояния h=602 мм и длины рычага 6 l1=300 мм определены зависимости изменений угла поворота рычага l1 при изменении длины гидроцилиндра от l2min=522 мм до l2max=842 мм (рис.4).
Рисунок 4 – Зависимость угла поворота рычага поворотной колонны от удлинения одного цилиндра (нижний график) и одновременного удлинения двух цилиндров (верхний график).
Полученные зависимости изменения угла φ1 нелинейны, в итоге получим нелинейные законы изменения скоростей и ускорений.
Определим скорости движения штоков гидроцилиндров механизма порота колонны со стрелой исходя из типоразмеров гидроцилиндров, принятых ранее и насоса НШ-32-УЖ3.
Площади сечения полостей гидроцилиндра ЦГ-50.30х320.22 составляют:
поршневая полость
Ап=0,25πD2=0,25π0,052=0,00196 м2,
штоковая полость
Ашт=0,25π(D2-d2)= 0,25π(0,052-0,032)= 0,00126 м2.
Коэффициент отношения площадей сечений
Ψ=Ап/Ашт=0,00196/0,00126=1,56.
Для насоса НШ-32-УЖ3 номинальная подача рабочей жидкости составляет Q=1,1437·10-3 м3/с, с учетом того, что одновременно работают два гидроцилиндра, то подача рабочей жидкости составляет Qц=Q/2=0,57·10-3 м3/с, и тогда скорость штока гидроцилиндра:
При нагнетании в поршневую полость
Vп=Qц/Ап=0,29 м/с,
При нагнетании в штоковую полость
Vшт=Qц/Ашт=0,45 м/с.
При этом, для принятого значения l1=300 мм средние угловые скорости поворота колонны составляют соответственно ωср=0,97 с-1 и ωср=1,5 с-1.
Используя таблицу 1 проанализируем диапазон возможных скоростей поворотной колонны при раздельной и совмещенной работе гидроцилиндров Ω=ω1±ω2 при различных режимах их работы (при нагнетании рабочей жидкости в штоковую) или поршневую полости).
Вариант 1. Шток первого гидроцилиндра соединен с цилиндром (корпусом) второго.
Таблица 2
Возможные комбинации сложения угловых скоростей колонны по варианту 1
|
Цилиндр 1 |
Рабочая полость |
+П |
+П |
0 |
+П |
-Ш |
|
ω1 |
0,97 |
0,97 |
0 |
0,97 |
-1,5 |
|
|
Цилиндр 2 |
Рабочая полость |
+П |
0 |
-Ш |
-Ш |
-Ш |
|
ω2 |
0,97 |
0 |
-1,5 |
-1,5 |
-1,5 |
|
|
Ω, с-1 |
1,94 |
0,97 |
-1,5 |
-0,53 |
-3 |
|
Из таблицы 2 видно, что при поворотах колонны в разные стороны диапазоны скоростей различны (рис.5).
Вариант 2. Шток первого цилиндра соединен со штоком второго.
Таблица 3
Возможные комбинации сложения угловых скоростей колонны по варианту 2
|
Цилиндр 1 |
Рабочая полость |
+П |
+Ш |
0 |
+П |
0 |
|
ω1 |
0,97 |
1,5 |
0 |
0,97 |
0 |
|
|
Цилиндр 2 |
Рабочая полость |
+Ш |
+П |
-П |
0 |
0 |
|
ω2 |
1,5 |
0,97 |
-0,97 |
0 |
0 |
|
|
Ω, с-1 |
2,47 |
2,47 |
-0,97 |
0,97 |
0 |
|
Для варианта 2 диапазоны скоростей при различных режимах работы цилиндров приведены на рис.6.
 Рисунок 5 – График скоростей поворота колонны при различных режимах работы цилиндров (Вариант 1).
Рисунок 5 – График скоростей поворота колонны при различных режимах работы цилиндров (Вариант 1).
 Рисунок 6 – График скоростей поворота колонны при различных режимах работы цилиндров (Вариант 2).
Рисунок 6 – График скоростей поворота колонны при различных режимах работы цилиндров (Вариант 2).
Как видно, второй вариант позволяет получить одинаковые угловые скорости поворота колонны в разные стороны при различных режимах работы гидроцилиндров, следовательно тандемная установка гидроцилиндров по варианту 2 оптимальна с точки зрения удобства управления и динамичности протекаемых процессов.
Соединение гидроцилиндров по первому варианту также может эффективно применяться для конкретных технологических процессов грузопереработки, когда стрела с грузом поворачивается с одной скоростью, а на холостом повороте в противоположную сторону перемещается быстрее, динамичность процессов не увеличивается, а время холостого пробега меньше.
Основные преимущества предлагаемой кинематической схемы привода поворотной колонны погрузчика:
1. При угле поворота стрелы в горизонтальной плоскости 75о, поворот колонны дополнительным цилиндром расширяет зону до 150о. Угол поворота стрелы естественно зависит от хода поршня цилиндра.
2. Поворот стрелы может происходить при угловой скорости, почти в два раза превышающую скорость одной из составных частей колонны, т.к. угловые скорости складываются. Асинхронной работой обоих цилиндров можно добиться более медленного поворота.
Литература
- Патент РФ №2323154 МПК В66С 23/86. Гидропривод поворотной колонны погрузчика. Несмиянов И.А., Рыпакова Н.С., Рогачёв А.Ф. Опубл. 27.04.2008. Бюл. №12.
- Герасун В.М., Несмиянов И.А., Турыгин П.В. Рычажные механизмы в телескопических стрелах погрузочных манипуляторов.// Тракторы и сельхозмашины. 2011. №8. С.32-35.