

Современный робот выполняет те или иные задачи на основании заложенной в него информации (часто в виде компьютерной программы). В последнее время появились роботы, оснащенные упрощенными формами зрения и ощущения; они имеют память и могут принимать простые решения. Роботы все активнее и активнее используются в жизни и быту человека. Наш же робот предназначен для облегчения работы человека, автоматизации и снижения затрат на сборку и прессование соломы и сена. Таким образом использование нашего робота предоставит людям возможность сократить затраты на топливо и зарплату рабочим, так как наш робот будет иметь электромотор, а также исключит необходимость проведения данной операции людьми.
Данный роботизированный пресс-подборщик будет эксплуатироваться на фермерских хозяйствах, а именно на полях сельхозугодий. Его задачей является подбор валков соломы, сена и их прессования с последующей обмоткой шпагатом либо проволокой и выталкиванием готового тюка или рулона на стол сбрасывания.
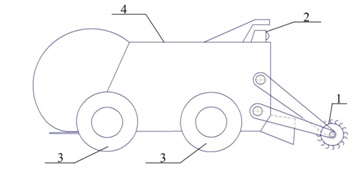
Рис. 1 – Передвижной роботизированный пресс-подборщик
1 – подборщик барабанного типа, 2 – сенсорные устройства, 3 – колесная платформа, 4 – корпус с электрооборудованием, электродвигателем и прессовальной камерой
Для робота выбрана колесная платформа. Это связано со спецификой местности, на которой ему предстоит работать, а именно: поля и прочие поверхности, обладающие средним коэффициентом сцепления. Устройство управления робота представляет собой некую вычислительную систему с контурным управлением движения. Программирование осуществляется с помощью специального языка с выносного пульта обучения, либо с консольной панели непосредственно на самом роботе. В качестве двигателя на данный робот было предложено установить электродвигатель. Электродвигатель для робота является более простым, нежели двигателем внутреннего сгорания. При выборе двигателя не стоит забывать о гидроизоляции. Электрооборудование робота состоит из нескольких компонентов: аккумуляторная батарея, генератор, электропривод манипулятора.
Помимо основной аккумуляторной батареи предусмотрен генератор. Генератор необходим для подзарядки аккумулятора во время работы. Он будет совмещен с электродвигателем. Электропривод манипулятора обеспечивает поднимание и опускание манипулятора на необходимую высоту над землей.
Энергия аккумулятора расходуется также на работу бортового компьютера, приведения в действие подборщика. Одной задач робототехники является навигация робота в пространстве, т.е. анализ ситуации и выбор маршрута самим роботом без участия человека. С ИК-диапазоном робот способен в зоне прямой видимости, четко ориентироваться в пространстве. Система навигации состоит из комплекса маяков. За каждым маяком закреплен его номер (сигнатура из пяти символов). При передаче инфракрасного сигнала возникают помехи: солнечный свет, отражение и лампы дневного света. Чтобы повысить помехоустойчивость передаваемого сигнала от маяков к ИК-приемнику, используется система кодирования канала. Для увеличения вероятности безошибочного распознавания сигнала на приемной стороне в условиях зашумленной среды используется метод перехода к широкополосному сигналу, добавляя избыточность в исходный сигнал. Для этого вместо одного передаваемого информационного бита надо передавать определенный код (последовательность так называемых чипов). Для проведения робота без столкновений с препятствиями в основу положено сканирование местности. Датчики (сенсоры) крепятся на плату, которая устанавливается в переднюю часть робота. Они сканируют местность впереди робота, тем самым при обнаружении постороннего объекта (человек, скот, домашние животные и различные грызуны) робот производит экстренную остановку. Так же для следования нашего робота по определенной линии (по линии сбора сена, соломы) будет использован датчик границы.
Рабочий процесс подборщика протекает следующим образом. При движении вдоль валка сена пальцы подбирающего барабана подборщика захватывают массу и подают ее к транспортеру. Между прессующими ремнями и ремнями транспортера, а также между верхним подвижным валиком и барабаном масса предварительно сжимается и уплотняется. Далее растительная масса поступает на прессующие ремни, образующие петлю, где и формируется рулон. По мере поступления массы диаметр рулона увеличивается. Увеличиваются и размеры петли за счет преодоления сопротивления натяжного устройства, образованного рамкой, подпружиненной штангой, гидроцилиндрами и клапаном В. Когда рулон сформирован, включается аппарат, который обматывает рулон шпагатом при остановленном агрегате. После обмотки рулона шпагатом защелки освобождают клапан. Под действием пружин штанг клапан поднимается вверх, и рулон выбрасывается из прессовальной камеры на землю. Гидроцилиндры возвращают натяжное устройство в исходное положение, и цикл процесса повторяется. Прессующие ремни — основной рабочий орган, формирующий рулон сена определенной плотности. Они представляют собой бесконечные ремни, охватывающие и огибающие систему роликов и барабан. При прессовании между барабаном и рядом расположенным роликом прессующие ремни образуют петлю, внутри которой формируется рулон. Обматывающий аппарат обвязывает рулон шпагатом. Особенность аппарата и принципа его работы заключается в том, что после передачи шпагата игла медленно поворачивается, перемещая шпагат вдоль рулона. Таким образом, рулон, вращаемый прессующими ремнями, наматывает на себя шпагат по спирали. Транспортер уплотняет растительную массу, поступающую с подборщика, и подает ее в прессовальную камеру к прессующим ремням. Он образован двумя бесконечными ремнями, надетыми на передний и задний подвижные валики.
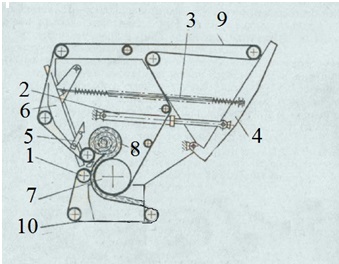
Рис.2-Прессовальная камера
1-подвижной валик, 2-гидроцилиндр, 3-штанга, 4-рамка, 5-защелка, 6-клапан, 7-барабан, 8-петля, 9-пресующий ремень, 10-транспортер
Для того чтобы робот мог достаточно точно отследить сформированную траекторию, на этапе планирования необходимо располагать точным знанием динамики манипуляционной системы. Однако на практике инерционные характеристики объекта манипулирования часто бывают неизвестны. Ниже исследуются особенности задачи планирования траекторий при наличии такой неопределенности.
Динамика манипуляционного робота в тензорных обозначениях может быть описан уравнением: 
 (1)
(1)
Где Ui – i- тая обобщенная сила; qi – i - тая обобщенная координата; Jij - матрица инерции; Cijk – массив кориолисовых коэффициентов, определяемый выражением: 
 (2) Rij - магрица вязкого трения; gi - сила тяжести, В дальнейшем используется правило Эйнштейна свертки индексов; так, в (1) все произведения суммируются по повторяющимся индексам от 1 до N, где N- число, степеней подвижности манипулятора. Матрица инерции Jij, массив кориолисовых коэффициентов Сijk и векторgi являются функциями положения манипулятора и матрицы псевдоинерции объекта манипулирования, включающей в себя массу, первые и вторые моменты объекта манипулирования.
(2) Rij - магрица вязкого трения; gi - сила тяжести, В дальнейшем используется правило Эйнштейна свертки индексов; так, в (1) все произведения суммируются по повторяющимся индексам от 1 до N, где N- число, степеней подвижности манипулятора. Матрица инерции Jij, массив кориолисовых коэффициентов Сijk и векторgi являются функциями положения манипулятора и матрицы псевдоинерции объекта манипулирования, включающей в себя массу, первые и вторые моменты объекта манипулирования.
Желаемая геометрическая ~ траектория задается в конфигурационном пространстве в параметрической форме 
 ,
, 


 (3)
(3)
При такой форме представления появляется возможность выразить положения, скорости и ускорения в степенях подвижности через параметр л и его производные по времени, Подставляя эти соотношения в уравнение динамики (1) можно получить:

 (4)
(4)
где м=л – псевдоскорость. Если объект манипулирования имеет некоторую номинальную матрицу псевдоинерции IN, то уравнение (4) можно представить в форме:

 (5)
(5)
где 
 Если инерционные характеристики объекта манипулирования отличаются от номинальных, то возмущенное уравнение динамики можно представить в виде:
Если инерционные характеристики объекта манипулирования отличаются от номинальных, то возмущенное уравнение динамики можно представить в виде: 
 (6)
(6)
Для того чтобы требуемые моменты не превысили возможности приводов, нужно выбрать такие м и м’, что при отклонениях ∆IN в известных пределах величина требуемого момента определяемого выражением (6), остается реализуемой, т.е. 
 ,
, 
 ,
,
Также могут быть установлены ограничения на скорость изменения этого момента как функции положений, скоростей и ускорений: 
 (7)
(7)
где F:RN х RNх RN→R; Кi – константа Для заданной геометрической траектории можно определить изменения коэффициентов Mi ,Qi и Si в (5), обусловленные изменением динамических характеристик манипуляционного робота.
При изменении инерционных характеристик объекта манипулирования изменяются коэффициенты Jij , Cijk и qi. Элементы матрицы инерции в соответствии с [1] могут быть представлены выражением:  (8)
(8) 
где Тр - 4 X 4 матрица однородного преобразования вектора, заданного в координатной системе, связанной с р -ым звеном манипулятора, в неподвижную координатную систему основания робота; Ip - матрица псевдоинерции P-го звена, заданная в P-ой системе координат. Если матрица псевдоинерции последнего звена изменяется на ∆IN, то матрица инерции манипулятора принимает вид: 
 (9)
(9)
Подставляя (8) в (9), можно получить:


 (10)
(10)
В том случае, когда ∆IN известно точно, имеется возможность вычислить точное отклонение момента от номинального. На практике обычно известны только ограничения на значения ∆IN, в качестве которых можно использовать границы норм ошибки ∆IN. По этим данным нужно определить границы диапазона изменения дui. Поскольку дMi ,дQi и дSiлинейны по ∆IN , то дui -также линейно по ∆IN. Если записать, то задача сводится к максимизации (или минимизации) линейной по ∆IN, функции Z при ограничениях вида 
 .
.
При планировании движений желаемая геометрическая траектория (3) задается упорядоченной последовательностью точек (л(k) ,q(k)). Процесс формирования движения сводится к определению в каждой точке скорости м и ускорения м’ . В дальнейшем для упрощения анализа рассматриваются только ограничения вида (7), зависящие только от положений и скоростей. Тогда эти ограничения можно представить как ограничения на м’, зависящие от л и м или, что эквивалентно, как показано в (2), как ограничения на dм/dл. На графике (л, м) каждой точке соответствует диапазон допустимых наклонов. Фазовая траектория в каждой точке фазовой плоскости должна проходить в направлении, лежащем внутри этого диапазона. Задача планирования траектории наибольшего быстродействия требует, чтобы в начальной и конечной точках движения скорость была нулевой (или некоторой известной фиксированной величиной), во всех промежуточных точках была максимально возможной с учетом ограничений на наклон фазовой траектории. Один из подходов к формированию такой фазовой траектории сводится к последовательному увеличению скоростей в каждой точке до тех пор, когда ни в одной точке нельзя будет увеличить скорость без нарушения ограничений. Эта процедура названа алгоритмом A и включает в себя следующие шаги:
А1: Установить в каждой точке заведомо реализуемые скорости (обычно используются все нулевые значения),
А2: Увеличивать скорости в каждой промежуточной точке кривой насколько это позволяют заданные ограничения,
АЗ: Если хотя бы одна скорость изменялась на шаге А2, вернуться к шагу А2; в противном случае – завершение процедуры. Более простым в вычислительном отношении является алгоритм А1:
А1′: Установить в каждой точке заведомо реализуемые скорости.
А2′: Установить величину текущего приращения скорости,
А3′: Увеличить скорости в каждой точке на величину приращения, если это совместимо с заданными ограничениями,
А4′(: Если скорость в какой-либо точке изменялась на шаге А3′ го вернуться к шагу A3′.
А5′: Если текущее приращение скорости меньше, чем величина заданного допуска, то останов, В противном случае уменьшить вдвое текущее приращение скорости и перейти к шагу A3′. Предложенный алгоритм завершается за конечное число шагов. В вычислительном отношении алгоритм A‘ достаточно прост.
Вывод: На наш взгляд данный робот будет полезен как на крупных, так и на небольших сельскохозяйственных угодьях. Устройство манипулятора и шасси подборщика могут быть использованы так же и для другого робота (например: робот снегоуборщик и т. д.).
Библиографический список
- Поезжаева Е.В.Промышленные роботы: учеб. пособие. в 3 ч. – М.: Изд-во УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009.
- Зенкевич С.Л Управление роботами – М.: Изд-во МГТУ им. Н.Э. Баумана, 2000.