Адаптивные системы управления – это системы способные преобразовывать параметры регулятора, его структуру в зависимости от изменения параметров объекта управления (ОУ) или внешних возмущений воздействующих на ОУ. Адаптивное управление широко используется во многих направлениях теории управления.
Параметры внешних воздействий, динамические хар-ки объекта, либо системы, поступаемся в процессе работы, в адаптивной системе автоматического управления, происходит активное изменение алгоритма управления, либо его параметров с целью оптимизировать работу замкнутой системы. В результате данного изменения алгоритма или его параметры (коэффициенты) находятся в постоянной связи с внешними воздействиями и параметрами ОУ.
Свойствами адаптивных систем управления являются:
- выходные парм-ры объекта регулирования и харак-ки возмущающих факторов находятся под постоянным контролем и управлением с помощью устройств, дополнительно включаеных в состав управляющей систем;
- наблюдаемое поведение ОУ описывается некоторым качественным показателем, оценивающим в колич-й форме характер протекания процесса упр-я;
- отклонение качественного показателя за пределы допустимых значений автоматически перенастраивает параметры регулятора или замену алгоритма управления, результатом, которых является достижение желаемого качественного показателя или реализации поставленной цели;
По характеру изменений в управляющем устр-ве адаптивные системы делят на две группы:
- самонастраивающиеся (изменяются только значения параметров регулятора);
- самоорганизующиеся (изменяется структура самого регулятора);
Системы, в которых присутствует идентификатор, подразделяются по способам управления на прямой и косвенный. При косвенном управлении вначале делается оценка параметров ОУ, после этого на основании полученных оценок определяются требуемые значения параметров регул-ра, и производится их подстройка. При прямом адаптивном управлении производится непосредственная оценка и подстройка параметров регул-ра, чем исключается этап идентификации параметров объекта.
По способу эффективности самонастройки системы с моделью делятся на системы с сигнальной (пассивной) и параметрической (активной) адаптацией. В системах с сигнальной адаптацией эффект самонастройки достигается без изменения параметров управляющего устройства с помощью компенсирующих сигналов. Системы, сочетающие в себе два этих вида адаптации, именуются комбинированными.
Актуальность применения адаптивных систем возникает в тех случаях, когда-либо имеется априорная неопределенность при математическом описании ОУ, либо хар-ки ОУ с течением времени изменяются.
Одним из распространенных классов адаптивных систем являются бес поисковые самонастраивающиеся системы, т.к. они просто реализуются, обеспечивают быструю адаптацию, без пробных воздействий на ОУ. Самонастраивающиеся система с ЭМ, строящиеся на основе информации о выходах системы и модели. Так как желаемые показатели качества системы управления заранее заложены в ЭМ, и в процессе функционирования путем соответствующей настройки параметров регулятора можно добиться устранения отклонения реальной системы и модели.
Разработка модели асинхронного двигателя вентилятора с частотно-амплитудным регулированием.
Рассмотрим адаптивную систему управления с ЭМ на примере модели асинхронного двигателя вентилятора с частотно-амплитудным регулированием.
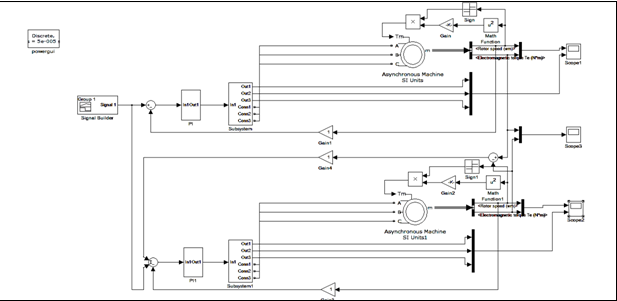
Рисунок 1. – Схема модели асинхронного двигателя с короткозамкнутым ротором, адаптивная система управления с ЭМ;

Рисунок 2.- Частотный преобразователь – Subsystem
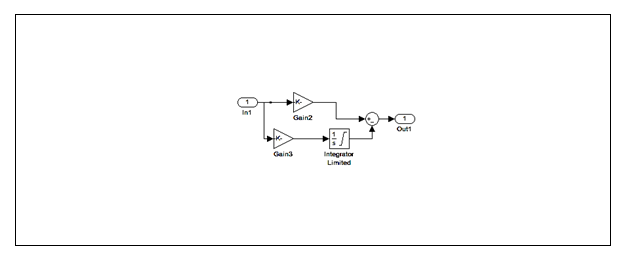
Рисунок 3.- Схема PI-регулятора.
Графический дисплей «wm, Те» отображает переходной процесс скорости и момента во времени, показания сети, представленные на рисунках 4.5.
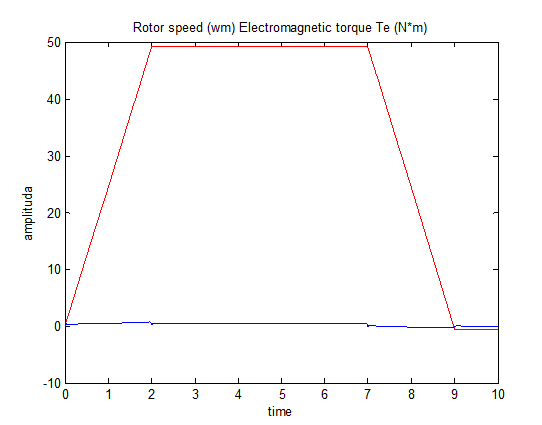
Рисунок 4.- Скорость и электромагнитный момент ЭМ.
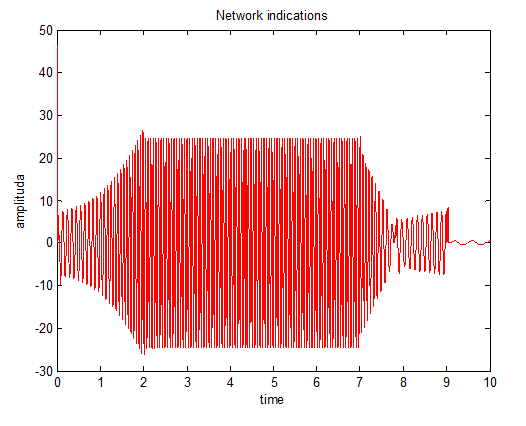
Рисунок 5.- Показания сети ЭМ.
Предположительно в процессе длительной работы вентилятора на лопатках вентилятора происходит налипание грязи, пыли, что существенно влияет на момент инерции J(kg.m^2) электродвигателя.
Графический дисплей «wm, Те» отображает переходной процесс скорости и изменение электромагнитного момента во времени, изменение показаний сети, представленные на рисунках 6.7.
Мы видим, что поведение отлично от эталонного, это происходит при изменении параметров объекта, в этом случае появляется ошибка, включается блок адаптации, перестраивается структура адаптивного регулятора, таким образом чтобы свести к эталонной модели объекта.
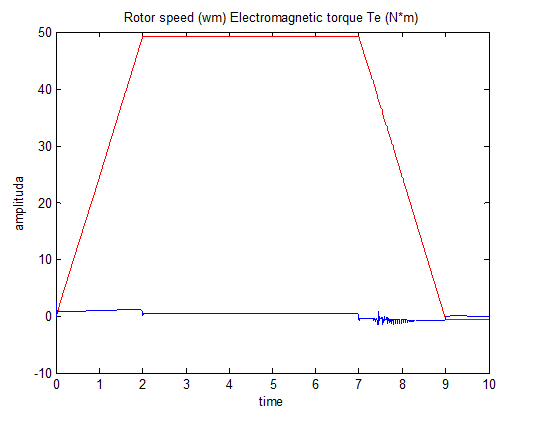
Рисунок 6. – Скорость и электромагнитный момент модели с увеличенным моментом инерции J(kg.m^2) электродвигателя.
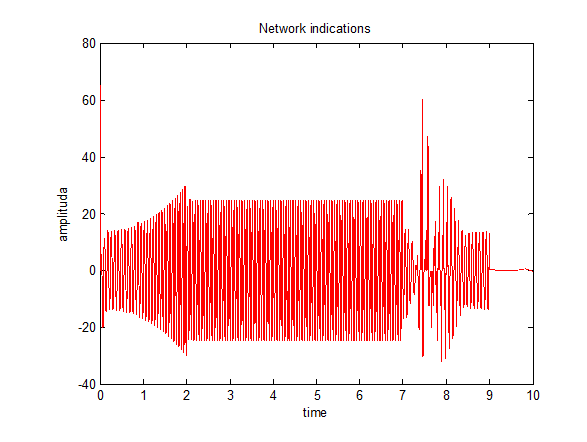
Рисунок 7. – Показания сети.
Графический дисплей «Те» отображает изменение электромагнитного момента во времени, представленные на рисунках – 8.9.10.
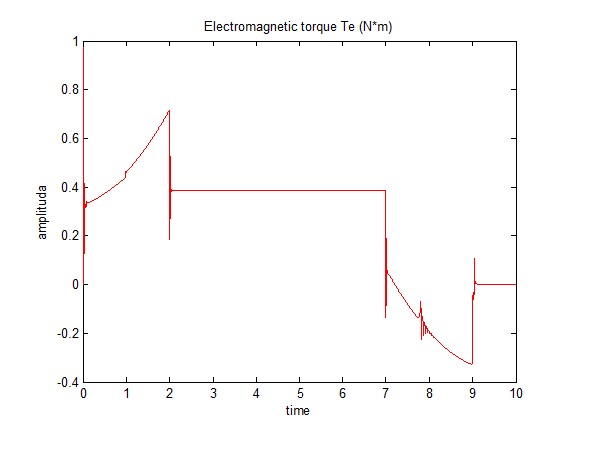
Рисунок 8. – Электромагнитный момент Те, ЭМ.
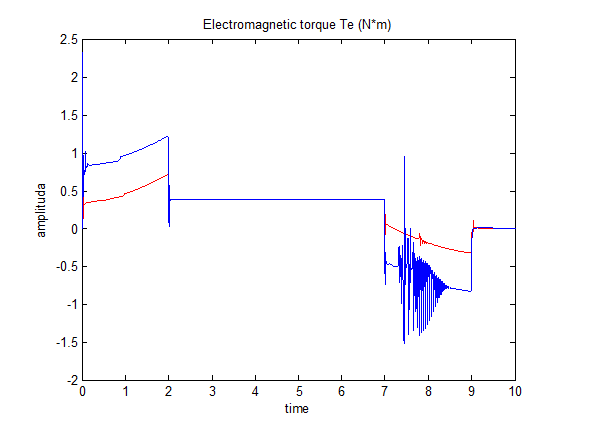
Рисунок 9. – Электромагнитный момент Те, при изменении момента инерции J(kg.m^2).

Рисунок 10. – Электромагнитный момент Те, при адаптивном управлении.
Мы видим, что поведение приближённо к эталонному, перестраивается структура регулятора, таким образом, чтобы свести к эталонной модели объекта. Если модель включена параллельно и используется вычислитель, определяющий параметры объекта, то в результате сравнения этих параметров с параметрами модели (с эталонами) определяется сигнал для устройства самонастройки. Для определения текущих значений параметров системы при этом обычно используются корреляционные методы, требующие осреднения соответствующих функционалов времени входных и выходных процессов системы на интервалах времени, существенно больших времени переходных процессов системы.
Библиографический список
- Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в Matlab 6.0: Учебное пособие. – СПб.: КОРОНА пинт. 2001.- 320с.
- Терехов В.М. Система управления электроприводов. Учебник. / 2004. – 296 с.
- Башарин А.В. Управление электроприводами: Учебное пособие для вузов 1982. – 392с.