Большое применение в сельскохозяйственном производстве нашли погрузчики с консольно-поворотной стрелой. Недостатками таких погрузчиков являются большие динамические нагрузки на погрузчик при повороте колонны с подвешенным к стреле грузом. Естественно, чем больше масса груза, тем больше динамические нагрузки на агрегат, особенно в момент его остановки. Известна гидравлическая схема погрузочного манипулятора [1] в которой для уменьшения динамических нагрузок на агрегат при горизонтальном повороте стрелы в крайние положения предусмотрены регулируемые дроссели, кинематически связанные с консольно-поворотным механизмом. При такой схеме плавное уменьшение скорости поворота происходит только в крайних положениях.Предлагаемая схема гидропривода погрузчика (рис.1) позволяет автоматически регулировать скорость поворота колонны в зависимости от массы перемещаемого груза [2].
Особенностью гидравлической схемы является то, что поршневая полость гидроцилиндра подъема стрелы 1 гидравлически, через дроссель 2 и согласующее устройство 3, связано с напорной магистралью, питающей гидроцилиндр поворота колонны 4. Согласующее устройство 3 представляет собой цилиндр с находящимся внутри подпружиненным плунжером 5, который перекрывает дроссельное отверстие 6 тем больше, чем больше давление в поршневой полости цилиндра 1.
Для данной схемы погрузчика определена зависимость угловой скорости колонны w от усилия на штоке цилиндра подъема стрелы F. На рис. 2 приведены графики угловой скорости и усилия на штоке в идеальном случае движения, то есть без колебательных воздействий.
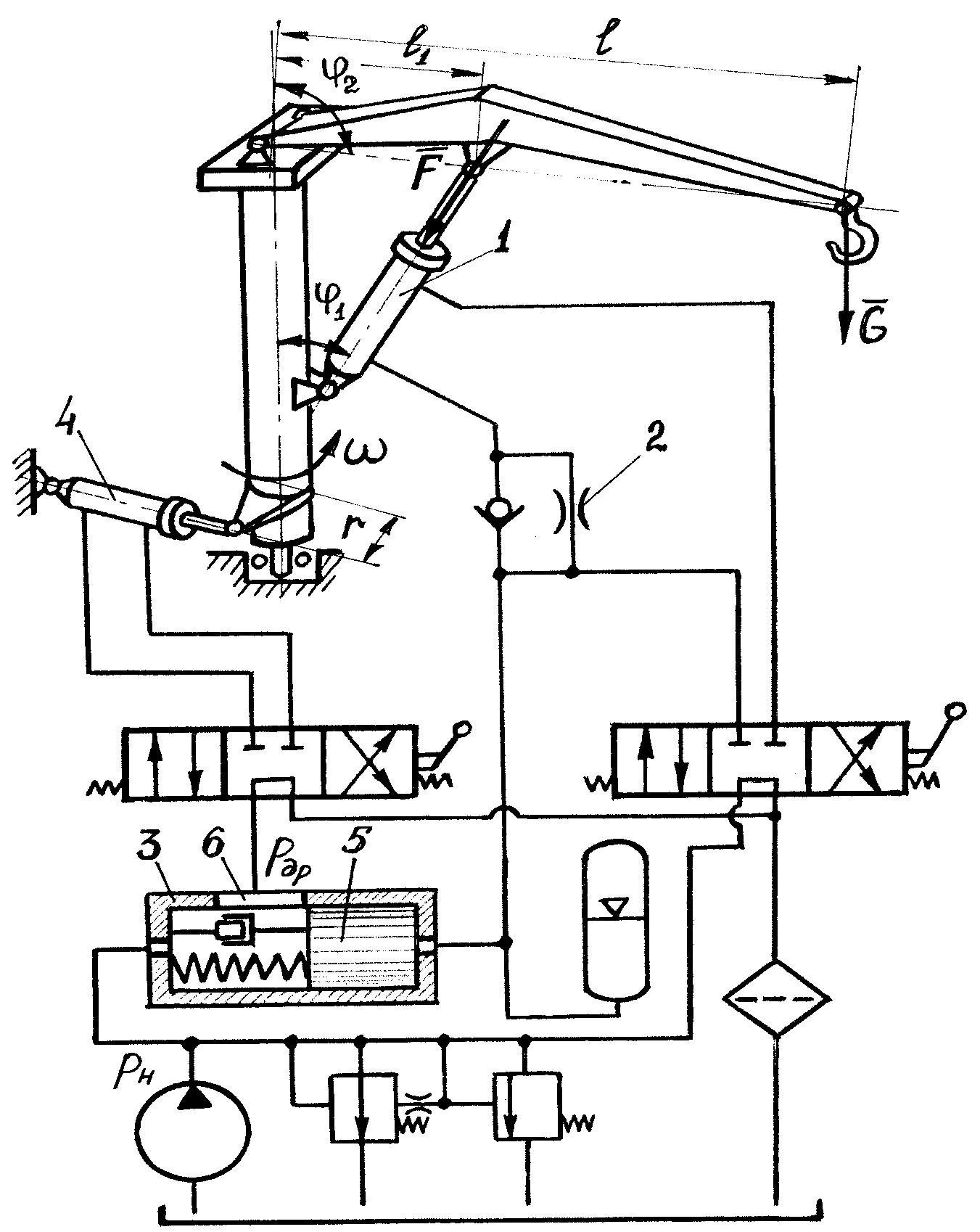
Рисунок 1 – Схема гидравлического привода погрузчика.
Усилие на штоке цилиндра подъема:
 (1)
(1)
Угловая скорость колонны
 (2)
(2)
где fдр – площадь сечения дроссельного отверстия, перекрываемого плунжером;
fП– площадь сечения плунжера.
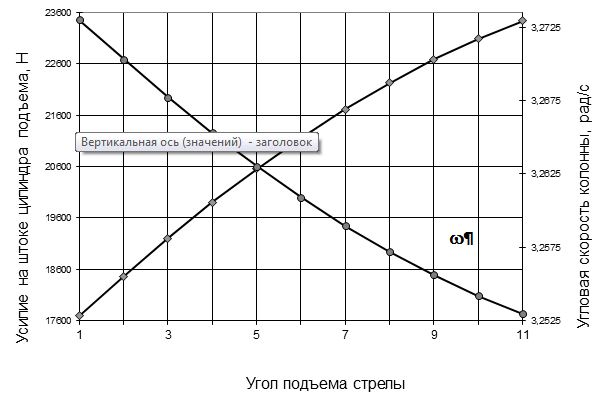
Рисунок 2. Зависимость угловой скорости колонны от статического усилия на штоке цилиндра 1.
Для погрузчиков с составной стрелой, длина которой l может изменяться в процессе перемещения груза, угловая скорость колонны в конечном виде будет зависеть и от угла наклона стрелы, и от вылета груза, то есть w=f(l, j2) (рис.3).
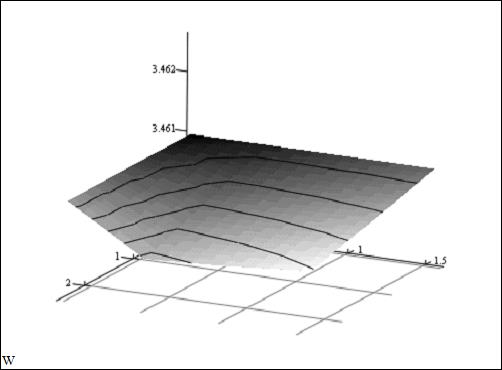
Рисунок 3. Зависимость угловой скорости колонны от угла подъема стрелы и вылета груза.
Для расширения технологических возможностей погрузчиков с расширенной зоной обслуживания наряду с улучшением динамических параметров предлагается следующий вариант гидропривода поворотной колонны [3].
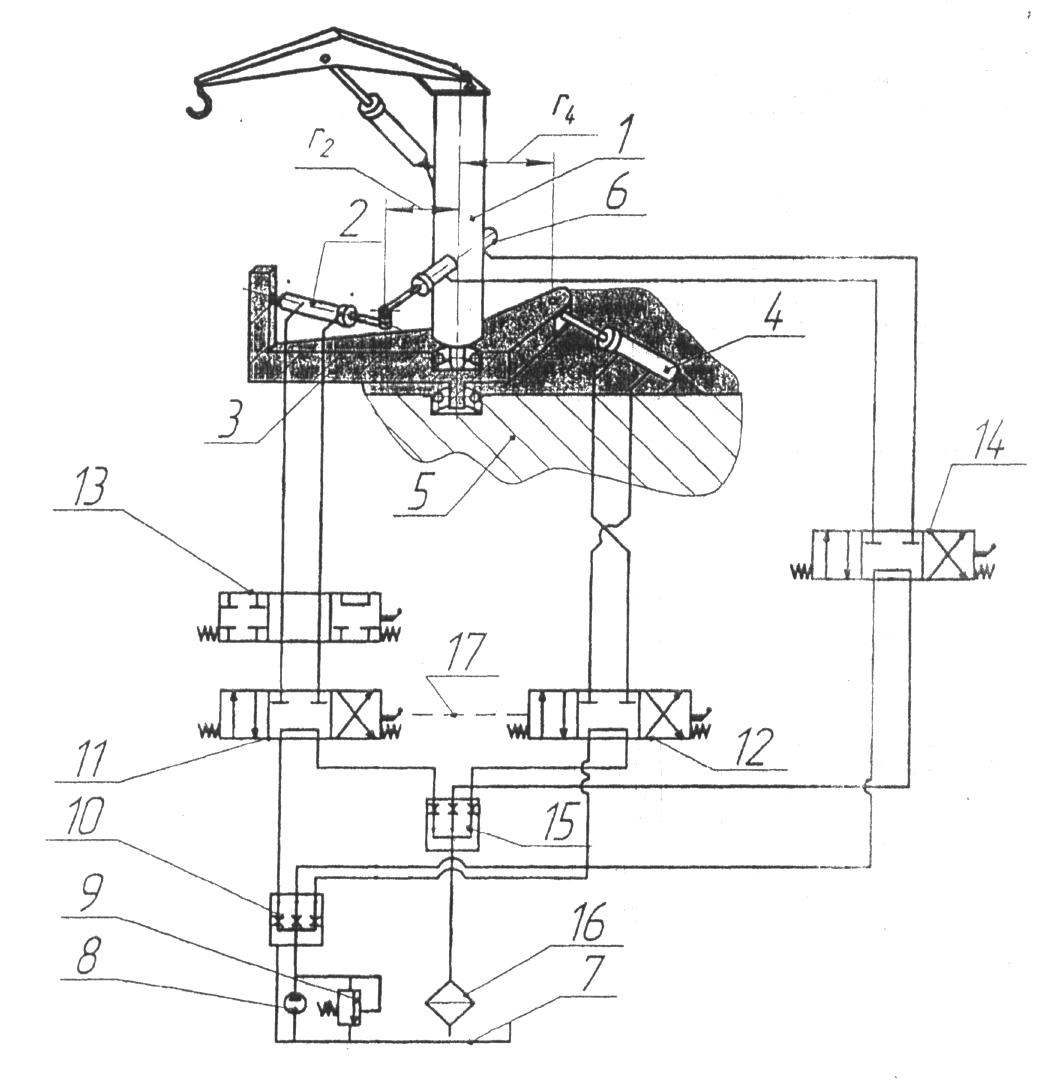
Рисунок 4. – Модернизированный гидропривод поворотной колонны погрузчика
Привод колонны погрузчика состоит (рис.4.4) из самой поворотной колонны 1, гидроцилиндра 2, связывающего колонну 1 и поворотную платформу 3, которая соединена с гидроцилиндром 4, а тот в свою очередь соединен с рамой 5, в корпусе колонны 1 закреплен корпус гидроцилиндра 6. Гидравлическая схема привода состоит из бака 7, насоса 8,
предохранительного клапана 9, делителя потока 10, распределителей 11, 12, 13, 14. Распределители 11 и 12 50 могут быть связаны жесткой кинематической связью 17. Сливные магистрали от распределителей 11 и 12, 14 сходятся посредством сумматора потока 15 в одну сливную магистраль, в которую включен фильтр 16.
Работа осуществляется следующим образом. Для поворота колонны против хода часовой стрелки рабочая жидкость из бака 7 забирается насосом 8 и подается через делитель потока 10 равными потоками к распределителям 11 и 12, 14. При перемещении золотника распределителя 11 вправо рабочая жидкость, беспрепятственно проходя через распределитель 13, поступает в поршневую полость цилиндра 2, тем самым поворачивая колонну 1 относительно поворотной платформы 3 на определенный угол. При перемещении золотника распределителя 12 вправо жидкость поступает в поршневую полость цилиндра 4, поворачивая при этом поворотную платформу 3 вместе с колонной относительно неподвижной рамы погрузчика 5. При перемещении золотника распределителя 14 вправо рабочая жидкость отделителя 10 поступает в штоковую полость цилиндра 6, при втягивании штока которого уменьшается плечо и, соответственно, увеличивается скорость поворота. Соответственно, если рабочая жидкость поступает в поршневую полость, то плечо увеличивается и уменьшается скорость.
Из штоковых полостей цилиндров 2, 4, 6 вытесняемая жидкость через распределители 13, 11 и 12, 14 поступает в сумматор потока 15 и далее через фильтр 16 в бак 7.
Поворот колонны 1 может осуществляться как поочередно цилиндрами 2 и 4 в любой последовательности их включения в работу, так и одновременной их работой. Для этого золотники распределителей 11 и 12 связываются жесткой кинематической зависимостью 17, вследствие чего включение в работу цилиндров 2 и 4 происходит синхронно, независимо от того, в какую сторону происходит поворот.
При синхронной работе распределителей 11 и 12, связанных механически посредством соединения можно отключить из работы цилиндр 2 распределителем 13. При перемещении его золотника вправо полости цилиндра 2 запираются, и при повороте составной колонны цилиндром 4 цилиндр 2 выступает в роли демпфера при резкой остановке. Эффект демпфирования возникает от деформации гибких рукавов для подвода рабочей жидкости. При переключении золотника распределителя 13 влево до конца полости цилиндра 2 соединяются. В этом случае гидроцилиндр 2 будет выступать в роли жидкостной пружины, дросселирование жидкости будет происходить в распределителе 13. Таким образом, распределитель 13 позволяет менять режимы снижения динамических нагрузок при резкой остановке и страгивании колонны.’
Расширение вариантов поворота колонны 1 погрузчика можно осуществлять асинхронной работой цилиндров 2, 4, 6. Для медленного поворота колонны 1 по ходу часовой стрелки при работе с хрупкими и опасными грузами жидкость подается через крайнюю правую секцию распределителя 12 в штоковую полость цилиндра 4, а через крайнюю левую секцию распределителя 10 в поршневую полость цилиндра 2, одновременно рабочая жидкость подается в поршневую полость цилиндра 6, тем самым увеличивается плечо и уменьшается скорость. Так как жидкость подается в разные полости цилиндров 2 и 4 и скорость штока 4 больше скорости штока 2, то скорость поворота колонны будет
Основные преимущества предлагаемой кинематической схемы привода поворотной колонны погрузчика:
- При зоне действия рабочего органа в горизонтальной плоскости 75о, поворот колонны дополнительным цилиндром расширяет зону до 150о. Угол поворота стрелы естественно зависит от хода поршня цилиндра.
- Поворот стрелы может происходить при угловой скорости, почти в два раза превышающую скорость одной из составных частей колонны, т.к. угловые скорости складываются. Асинхронной работой обоих цилиндров можно добиться более медленного поворота, а в нужный момент времени плавно останавливать стрелу.
- При повороте стрелы внешней частью колонны (цилиндром 4), цилиндр 2 будет выступать в роли демпфера.
Предложенные варианты гидропривода погрузчиков с поворотным основанием помимо расширения их технологических возможностей позволяет значительно снизить динамические нагрузки в гидроприводе и на металлоконструкцию всего погрузочного агрегата.
Библиографический список
- Герасун, В.М. Гидрокрановая установка на тракторе./ Герасун В.М., Пындак В.И., Строков В.Л. // Техника в сельском хозяйстве. – №5. – 1978. – С.82-84.
- Патент РФ № 2323154. Гидропривод поворотной колонны погрузчика. Несмиянов И.А., Рыпакова Н.С., Рогачев А.Ф. Опубл. 27.04.2008. Бюл. №12.
- Патент РФ № 2455222. Гидропривод погрузчика с поворотной колонной. Несмиянов И.А., Герасун В.М., Воробьева Н.С., Токарев В.И., Турыгин П.В. Опубл. 10.07.2012. Бюл. №19.