КОМАРОВ С.Г. УСТРОЙСТВО ВЕСОВОГО КОНТРОЛЯ ПРОИЗВОДИТЕЛЬНОСТИ ОДНОКОВШОВОГО ЭКСКАВАТОРА
Библиографическая ссылка на статью:
// Современная техника и технологии. 2012. № 8 [Электронный ресурс]. URL: https://technology.snauka.ru/2012/08/1310 (дата обращения: 02.08.2026).
Комаров С.Г., независимый исследователь, электромеханик
Предложено устройство автоматического весового контроля производительности одноковшового экскаватора как модернизация известного устройства, описанного в изобретении к авторскому свидетельству СССР № 812891 и прошедшего промышленные испытания при погрузке железнодорожных вагонов горной массой одноковшовым экскаватором типа ЭКГ-4,6 УЗТМ. Обозначена возможность изготовления устройства с применением специализированного микропроцессора.
На чертеже представлена структурная схема устройства.
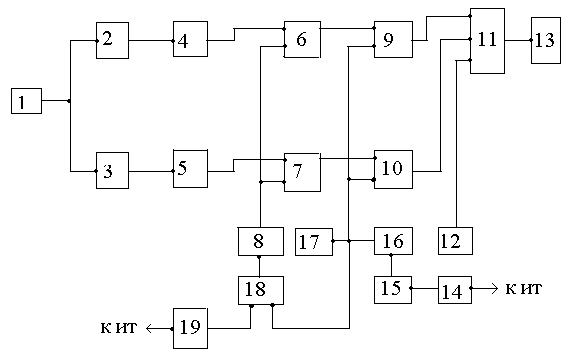
Устройство состоит из датчика 1 веса (измерительного преобразователя усилий в грузовом канате экскаватора в электрический сигнал), ключей 2, 3 коммутации в каналах фиксации веса соответственно порожнего и гружёного ковша, запоминающих элементов 4, 5 – конденсаторов, соединённых с ними по первым входам компараторов 6, 7 (сравнивающих устройств с высокоомными входами), генератора 8 линейно-изменяющегося напряжения, подключенного выходом ко вторым входам компараторов 6, 7, подключенных первыми входами к выходам компараторов 6, 7 управляющих триггеров 9, 10; логического элемента «НЕ» 11, подключенного первым входом канала совпадений с выходом управляющего триггера 9, а входом канала запрещения с выходом управляющего триггера 10; генератора 12 эталонных импульсов, подключенного выходом к второму входу канала совпадений логического элемента «НЕ» 11; цифрового суммирующего блока 13, подключенного к выходу логического элемента «НЕ» 11; конечного выключателя 14 механизма открывания ковша, подключенного входом к источнику тока (ИТ); переключателя 15 рода работы, соединённого входом с выходом конечного выключателя 14 механизма открывания ковша; одновибратора 16 (ждущего мультивибратора) управления измерением в период времени порядка 5-ти секунд, соединённого входом через диодно-ёмкостной ключ (на чертеже не показан) переднего фронта импульса с выходом переключателя 15 рода работы, а выходом – через диодно-ёмкостные ключи (на чертеже не показаны) переднего фронта импульса со вторыми входами управления триггеров 9,10; элемента времени 17с заданной выдержкой времени на управление порядка 2-х секунд, подключенного на выходе одновибратора 16 управления измерением; логического элемента «И» 18, соединённого первым входом с выходом одновибратора 16; ключа 19 коммутации, подключенного входом к источнику тока (ИТ), а выходом – ко второму входу логического элемента «И» 18. При этом ключи 2, 19 коммутации управляются элементом времени 17, а ключ 3 коммутации – одновибратором 16. Запоминающие элементы 4, 5 – конденсаторы подключены входами через заданные активные сопротивления (на чертеже не показаны), образующие совместно с конденсаторами 4, 5 интегрирующие цепочки.
Устройство работает следующим образом.
В момент открывания гружёного ковша для его разгрузки над транспортной площадкой от действия механизма открывания ковша происходит срабатывание конечного выключателя 14 (переключатель 15 рода работы при этом находится во включенном состоянии) и запуск одновибратора 16 управления измерением, выходной сигнал которого через диодно-ёмкостные ключи переднего фронта импульса устанавливает управляющие триггеры 9, 10 в исходное состояние и, кроме того, подаёт сигнал на ключ 3 коммутации для его отключения. Из-за чего ключ 3 коммутации временно разрывает измерительную цепь, при этом проинтегрированное (для снижения действия динамических пульсаций) значение фактической загрузки ковша с весом мёртвой системы фиксируется в конденсаторном запоминающем элементе 5.
При запуске одновибратора 16 его выходной сигнал также подаётся на первый вход логического элемента «И» 18, подготавливая последний к работе. Затем полная разгрузка ковша снижает выходное напряжение датчика 1 веса, проинтегрированное значение которого оказывается приложенным к конденсаторному запоминающему элементу 4.
При запуске одновибратора 16 его выходной сигнал подаётся и на элемент времени 17, срабатывание которого приводит через время порядка 2-х секунд (время разгрузки ковша, заранее определённое экспериментально) к срабатыванию ключа 2 коммутации и к разрыву на его участке измерительной цепи. Фактическое проинтегрированное (для снижения действия динамических пульсаций) значение веса порожнего ковша (веса мёртвой системы) фиксируется в конденсаторном запоминающем элементе 4.
Срабатывание элемента времени 17 также через время порядка 2-х секунд приводит к замыканию ключа 19 коммутации, из-за чего от источника тока (ИТ) поступает напряжение на второй вход логического элемента «И» 18. При этом логический элемент «И» 18 срабатывает и на своём выходе образует сигнал запуска генератора 8 линейно-изменяющегося (возрастающего) напряжения, которое приложено одновременно на вторые входы компараторов 6,7 формирования выходных импульсов при порожнем и гружёном ковше.
В момент равенства линейно-возрастающего напряжения генератора 8 и напряжения на первом входе компаратора 6, соответствующего весу мёртвой системы (при разгрузившемся ковше), на выходе компаратора 6 появляется импульс напряжения, который опрокидывает сопряжённый управляющий триггер 9. Появившееся напряжение на выходе триггера 9 оказывается приложенным к первому входу канала совпадений логического элемента «НЕ» 11. Поскольку на второй вход канала совпадений логического элемента «НЕ» 11 поступают электрические импульсы от генератора 12 эталонных импульсов, а сигнал запрещения на вход канала запрещения логического элемента «НЕ» 11 ещё не поступил, то высокочастотные эталонные импульсы уходят в цифровой суммирующий блок 13.
В момент, когда возрастающее напряжение генератора 8 на входе второго компаратора 7 достигает величины напряжения на конденсаторном запоминающем элементе 5, соответствующего весу гружёной системы, на выходе компаратора 7 появится напряжение, которое опрокидывает управляющий триггер 10, выходное напряжение которого оказывается приложенным на вход канала запрещения логического элемента «НЕ» 11. Логический элемент «НЕ» 11 срабатывает, прекращает прохождение эталонных импульсов от генератора 12 и подсчёт импульсов цифровым суммирующим блоком 13, образуя фиксирование разностного сигнала, создаваемого гружёной и мертвой системами в период стабилизации рабочих органов экскаватора – положения ковша в пространстве.
После этого вскоре заканчивается время выдержки одновибратора 16 управления измерением и тем самым осуществляется возврат в исходное состояние одновибратора 16, элемента времени 17 и ключей 2, 3, 19 коммутации, т. е. возврат на режим готовности к следующему взвешиванию груза. Управляющие триггеры 9, 10 переходят в исходное состояние при следующем срабатывании одновибратора 16 управления измерением от действия конечного выключателя 14 механизма открывания ковша.
Предложенный вариант автоматического весового контроля производительности одноковшового экскаватора обозначает и возможный путь использования специализированного микропроцессора для весового контроля производительности одноковшового экскаватора. Специализированный микропроцессор содержит порт ввода, сам микропроцессор, память программы (ПЗУ), память данных и порт вывода. Микропроцессор предназначен для цифровой обработки информации (в том числе, порт ввода преобразует электрический сигнал датчика веса в кодовую форму), для управления ходом этой обработки на основе кодов команд программы (в том числе, на исходное запоминание сигналов датчика веса в кодовой форме до и после разгрузки ковша и вычисление разности фиксированных данных), а порт вывода преобразует результат вычислений считывающим и запоминающим устройствами в число эталонных импульсов, фиксируемых счётчиком импульсов. При этом также могут быть учтены небольшие изменения веса мёртвой и гружёной системы, в том числе, за счёт учёта текущего расположения ковша в пространстве (т. е. с применением координатного измерителя текущего расположения ковша в пространстве и электронной компенсации некоторых изменений веса мёртвой и гружёной системы).
Предполагается, что читатель знаком с основными понятиями микропроцессорной техники, образующей локальную систему обработки и накопления информации. Встраивание микропроцессора в измерительную систему позволяет оптимизировать режим работы измерительной системы и за счёт этого получить прямой и косвенный технико-экономический эффект. Прямой технико-экономический эффект выражается в экономии потребляемой энергии, повышении срока службы измерительной системы. Косвенный технико-экономический эффект связан со снижением требований к обслуживающему персоналу.
Использованный источник информации:
Комаров С. Г. и др. Устройство для контроля производительности одноковшового экскаватора. Авторское свидетельство СССР № 812891, 1980.
Все статьи автора «Комаров Станислав Григорьевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.