Широкое использование регулируемых электроприводов привело к тому, что современный электропривод является не только энергосиловой основой, позволяющей обеспечить производственные механизмы необходимой механической энергией, но и средством управления технологическими процессами, так как задачи по реализации качества производственных процессов в настоящее время в большинстве случаев возлагаются на системы управления регулируемыми электроприводами в сочетании с системами технологической автоматики. В связи с возрастанием цен на энергоносители, в частности на электроэнергию, и ограниченными возможностями увеличения мощности энергогенерирующих установок проблема энергосбережения, в том числе снижения электропотребления, приобретает особую актуальность.
В работе решается проблема обеспечения энергосбережения с помощью асинхронных двигателей, которые являются основными преобразователями электрической энергии в механическую.
Построена математическая модель, рассчитанная на подъём электромостового крана, приводящийся в действие от асинхронного электродвигателя с коротко замкнутым ротором, смоделированная при помощи программы Matlab 7.12, включающую в себя пакеты Simulink и Sim Power Systems.
Построенная модель механизма подъёма мостового крана с амплитудно-частотным управлением представлена ниже (рис.1).
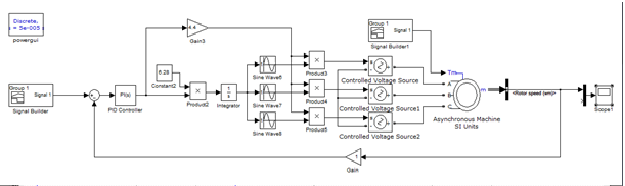
Рисунок 1. – Эталонная модель виртуальной машины с амплитудно – частотным управлением и подключенная выходом к блоку измерения.
На рисунке ниже представлены результаты моделирования нашей эталонной модели (график скоростей).
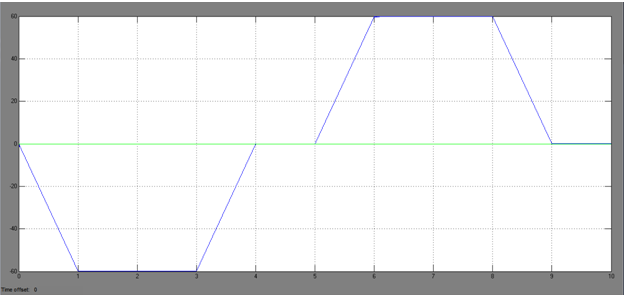
Рисунок 2. – График скоростей эталонной модели.
На изображении ниже представлена адаптивная модель виртуальной машины с амплитудно – частотным управлением, подключенная выходом к блоку измерения (рис. 3).
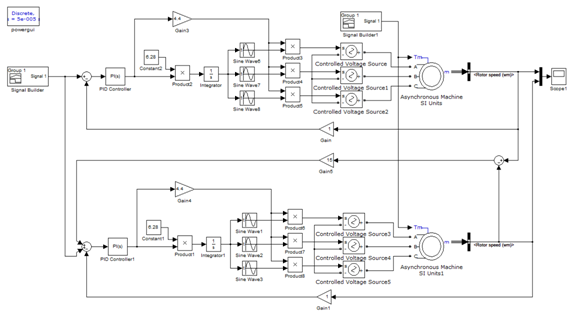
Рисунок 3. – Адаптивная модель виртуальной машины электромостового крана с амплитудно – частотным управлением, подключенная выходом к блоку измерения.
На рисунке ниже приведено сравнение эталонной системы и подстраивающейся без усилителя (график скоростей). В нашем случае у подстраивающейся системы был увеличен момент инерции в 5, в несколько раз была увеличена сила трения, также подразумевая нагрев, были увеличены в несколько раз сопротивления статора и ротора.
В результате на графике видна просадка скорости у подстраивающейся системы в сравнении с эталонной (рис. 4).
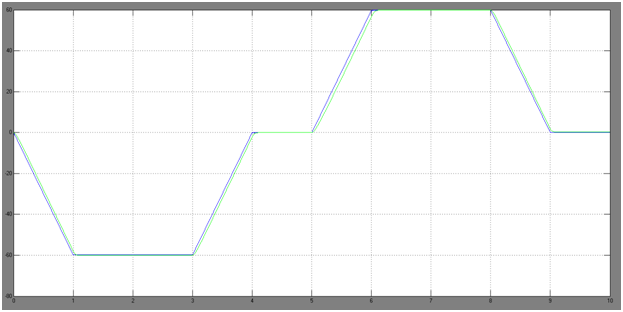
Рисунок 4. – сравнение эталонной системы и подстраивающейся (график скоростей).
Полученная просадка устраняется усилителем Gain5, коэффициент усилителя в нашем случае составил 15. Результаты моделирования представлены ниже на рисунке 5.
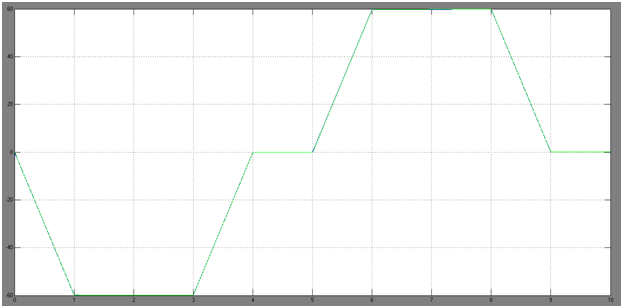
Рисунок 5. – графики скоростей адаптивной модели виртуальной машины электромостового крана с амплитудно – частотным управлением.
На графике представленном выше мы наблюдаем почти что полную идентичность заданных скоростей.
Библиографический список
- Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink.: ДМК Пресс; СПб.: Питер,2008. – 288с.:ил.
- Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК.: СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты.:Екатеринбург: УРО РАН, 2000 г. , 654 стр.
- Основы электрического транспорта. Учебник. / Под ред. Слепцова М. А. – М.: Издательский центр «Академия», 2006. – 464 с.
- Сидоров Н. И., Сидорова Н. Н. Как устроен и работает электровоз. – М.: Транспорт, 1988. – 233 с.