ПОСТРОЕНИЕ МОДЕЛИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА ДЕРЕВООБРАБАТЫВАЮЩЕГО СТАНКА
Череповецкий государственный университет
магистрант кафедры электротехники и электроэнергетики
Аннотация
В статье рассмотрены вопросы разработки оптимального метода управления электроприводом, для сокращения износа оборудования, продление его работоспособности и как результат сокращение затрат на ремонт и обслуживание. Поставлена задача создания модели оптимального управления.
Ключевые слова: асинхронный электропривод, деревообрабатывающий станок, моделирование, Оптимальное управление, электротехническое оборудование
BUILDING A MODEL OF OPTIMAL CONTROL OF ELECTRIC POWER WOODWORKING MACHINES
Cherepovetsky State University
Graduate Department of Electrical and Power
Abstract
The article discusses the development of an optimal method of motor control in order to reduce wear and tear , extending its functionality and as a result reduce the cost of repairs and maintenance. Tasked with creating a model of optimal control.
Keywords: asynchronous electric, electrical equipment, modeling, Optimal control, woodworking machine
Библиографическая ссылка на статью:
Растутаев Е.В. Построение модели оптимального управления электропривода деревообрабатывающего станка // Современная техника и технологии. 2014. № 1 [Электронный ресурс]. URL: https://technology.snauka.ru/2014/01/2852 (дата обращения: 31.07.2026).
Оптимальное управление — это управление методы которого позволяют достичь желаемого результата наилучшим (в некотором смысле) образом в соответствии с критерием оптимизации; например, реализовать цель управления за наименьшее возможное время или с максимальным экономическим эффектом. [2, с. 32]
Для решения задачи оптимального управления нужно построить мат. модель управляемого объекта или процесса, которая описывает его изменение в течение времени под влиянием управляющего процесса и его настоящего состояния. Математическая модель для задачи оптимального управления включает в себя: постановка цели управления, выраженную через критерии качества управления; определение математических уравнений, описывающих способы перемещения объекта управления; установка ограничений на используемые ресурсы в виде уравнений или неравенств. [1, с. 105]
Для описания детерминированного управляемого объекта или процесса используются уравнения в дифференциальной форме. В большинстве случаев применяются дифференциальные уравнения вида . В математических моделях большей сложности для описания объекта используют дифференциальные уравнения с частными производными. Для описания управляемого объекта стохастического типа используют стохастические дифференциальные уравнения. [1, с. 66]
Если решение поставленной задачи оптимального управления не является непрерывно зависящим от исходных данных (некорректная задача), то такая задача решается специальными численными методами. [3, с. 11]
Обучающейся системой оптимального управления называется такая система оптимального управления, которая способна накапливать опыт и на основе его улучшать свою работу. [2, с. 107]
Реальное поведение каждого отдельного объекта или всей системы в целом всегда отличается от программной модели. Это обусловлено неточностью в начальных условиях, неточностью реализации программного управления, неполной информацией о внешних возмущениях, действующих на объект и тому подобное. Поэтому обычно используется система автоматического регулирования для того что бы минимизировать отклонения в поведении реального объекта от оптимальной модели. [3, с. 54]
Для исследования была выбрана дисковая пилорама с двумя электроприводами для работы и перемещения рабочей части станка.
В связи с тем, что каждая порода дерева имеет свою плотность, а так же зачастую попадаются различные металлические объекты, на рабочий механизм оказывается различное сопротивление, что приводит к повышению токов на обмотке электропривода и происходит нагрев оборудования. При длительном нагреве обмотки происходит её оплавление (после превышения критической температуры), что приводит к неработоспособности электропривода и необходимости в ремонте. Приходится производить ремонт двигателя, работа встаёт на некоторый период, что бы избежать такого, необходимо регулировать скорость подачи рабочего механизма в зависимости от воздействующего сопротивления на рабочий механизм, который выражается в изменении токов.

Рисунок 1. Схема работы электроприводов дисковой пилорамы при оптимальном управлении.
С помощью датчика тока снимается значение тока, его значение берётся по модулю. При помощи передаточной функции выпрямляем сигнал тока. На рисунке 2 показано изменение тока статора в зависимости от нагрузки.
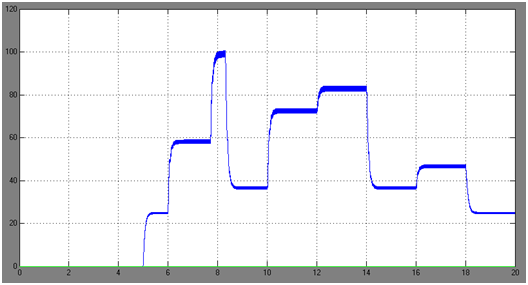
Рисунок 2. График изменения тока.
Для предотвращения плавки обмотки возбуждения, необходимо что бы ток не превышал значения в 80 А, поэтому при повышении тока выше 80 А необходимо снизить скорость двигателя, перемещающего рабочую часть пилорамы. Изменять скорость мы будем при помощи изменения частоты. На рисунке 3 показано изменение частоты в зависимости от изменения тока статора.
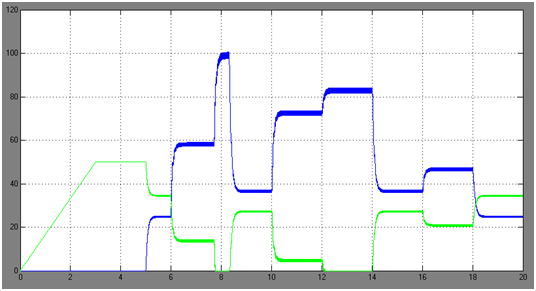
Рисунок 3. Графики изменения: 1. тока (синий); 2. частоты (зелёный).
На рисунке 4 показано изменение скорости двигателя для перемещения рабочей части дисковой пилорамы.
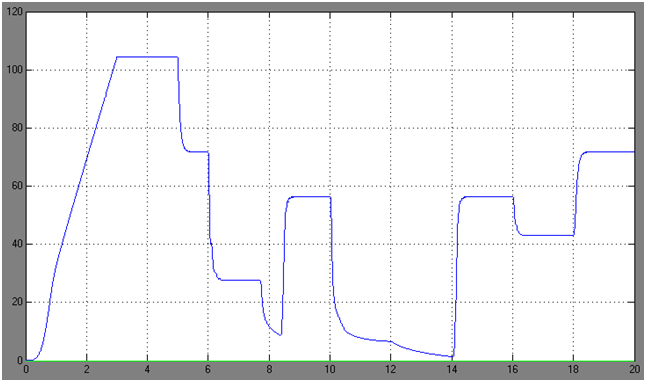
Рисунок 4. Скорость электродвигателя для перемещения рабочей части.
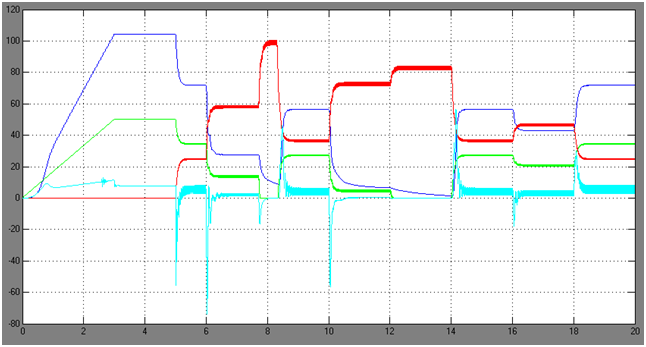
Рисунок 5. 1. График скорости электродвигателя для перемещения рабочей части (синий); 2. График частоты (зелёный); 3. График тока статора (красный); 4. График момента электродвигателя для перемещения рабочей части (голубой)
На рисунке 5 выведены графики изменения тока статора, частоты питания двигателя, момент и скорость двигателя перемещения. Как видно из графиков при увеличении тока уменьшается скорость двигателя, а при пересечении тока отметки в 80 А питание двигателя отключается и электропривод работает в режиме без динамического торможения, по инерции.
Оптимальное управление позволяет продлить работу электроприводов на многих промышленных объектах и сократить количество (а то и вовсе избежать) внеплановых ремонтов и простоев производства, а так же повысить экономический эффект, обусловленное сокращением затрат на электроэнергию и ремонт (замены) оборудования.
Библиографический список
- Терехов В. М., Осипов О. И. Системы управления электроприводов: учебник для студ. высш. учеб. заведений/ под ред. В. М. Терехова. – М.: Издательский центр «Академия», 2006. – 304 с.
- Растригин Л.А. Современные принципы управления сложными объектами. - М.: Сов. радио, 1980. - 232 с.
- Алексеев В.М., Тихомиров В.М., Фомин С.В. Оптимальное управление. - М.: Наука, 1979, УДК 519.6, - 223 c.
Все статьи автора «Евгений Вячеславович»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.