АКТЮАТОРЫ НАНО- И МИРОПЕРЕМЕЩЕНИЙ ДЛЯ СИСТЕМ УПРАВЛЕНИЯ, КОНТРОЛЯ И БЕЗОПАСНОСТИ
1Пензенский государственный университет, аспирант кафедры «Приборостроение»
2Пензенский государственный университет, доктор технических наук, профессор, заведующий кафедрой «Приборостроение»
Аннотация
Данная статья посвящена вопросам исследования и создания актюаторов для нано- и микроперемещений. Она носит обзорный и обобщающий характер. Проведенное исследование позволяет получить представление о современном состоянии разработок в области создания актюаторов для систем управления, контроля и безопасности.
Ключевые слова: актюатор, безопасность., контроль, нано- и микроперемещение, управление
NANO- AND MICRO- DISPLACEMENTS ACTUATORS FOR THE DRIVE, CONTROL AND SECURITY SYSTEMS
1Penza State University, Graduate student of the Department «Instrument engineering»
2Penza State University, Doctor of technical Sciences, Professor, head of the Department «Instrument engineering»
Abstract
This article focuses on the research and creation of actuators for nano- and micro- displacements. It is a review and general in nature. The analysis performed provides a picture of the current state of developments in the field of actuators drive, control and safety systems.
Библиографическая ссылка на статью:
Бардин В.А., Васильев В.А. Актюаторы нано- и мироперемещений для систем управления, контроля и безопасности // Современная техника и технологии. 2014. № 2 [Электронный ресурс]. URL: https://technology.snauka.ru/2014/02/3057 (дата обращения: 30.07.2026).
С развитием систем управления, контроля и безопасности, применением для их создания нано- и микротехнологий, нано- и микросистемной техники возрастает потребность в устройствах для точного позиционирования элементов таких систем. В связи с этим актуальными являются вопросы исследования и создания актюаторов для нано- и микроперемещений, обеспечивающих нано- и пикометровое разрешение [1−6] .
Ведущими зарубежными производителями пьезоприводов для нано- и микроперемещений являются PhysicInstrumente (PI, Германия), NewScaleTechnologies (NST, США), CedratTechnologies (Франция), MorganTechnicalCeramics (MTCElectroCeramics, UnitedKindom), NoliacGroup (Дания), PiezoKinetics, Inc. (США), PiezoSystemsInc. (США), PiezomechanikGmbH (Германия), Piezosystemjena (Германия),OmegaPiezoTechnologiesInc. (США), TRS Technologies, Inc. (США), CeramTec (Германия), Johnson Matthey Catalysts (Германия), Kinetic Ceramics, Inc. (США), AEI (США), Ferroperm Piezoceramics A/S (Дания), APC International, Ltd (США), NEC TOKIN Corporation (Япония), EPCOS · A Member of TDK-EPC Corporation (Япония), вРоссии – ОАО «НИИ «Элпа» (Россия) [1].
Анализ существующих и перспективных разработок производителей показывает, что перспективными направлениями создания двигателей для нано- и микроперемещений являются – основанные на использовании пьезоэлектрического и пьезомагнитного эффектов [7, 8]. Первый эффект заключается в изменении линейных размеров отдельных материалов в электрическом, а второй – во внешнем магнитном поле. Оба пьезоэффекта обратимы. В датчиках механических величин используют прямой пьезоэффект [9–12]. В пьезодвигателях используют обратный пьезоэффект, когда при приложении электрического или магнитного поля изменяются линейные размеры материала. Двигатели, основанные на пьезоэлектрическом эффекте более предпочтительны, поскольку не чувствительны к действию магнитных полей и имеют более широкую сферу применения.
Пьезоэффект наблюдается в кристаллах, не имеющих центра симметрии [13]. Типичным пьезоэлектриком является кварц − a-SiO2 (a-кварц), пьезоэлектрические свойства проявляются более чем у 1500 веществ. Пьезоэлектрическими свойствами обладает керамика: BaTiO3, PbTiO3, Pb[ZrxTi1−x]O3 0≤x≤1 (PZT или ЦТС), KNbO3,LiNbO3,LiTaO3,Na2WO3, ZnO, Ba2NaNb5O5, Pb2KNb5O15. В зависимости от используемого пьезоэлектрического материала пьезодвигатели (актюаторы) могут быть пьезокристаллическими (на базе монокристаллов) и пьезокерамическими (на базе поликристаллов пьезокерамики). На практике пьезокерамические актюаторы нашли более широкое применение [14 – 16].
Выбор пьезоматериалов для пьезодвигателей осуществляют в основном по следующим параметрам: пьезомодуль в направлении рабочих деформаций, модуль Юнга, коэффициент электромеханической связи и механическая добротность. Они определяют диапазон перемещений, упругие и резонансные свойства, эффективность преобразования электрической энергии в механическую, степень затухания колебательных процессов.
Пьезодвигатель конструктивно состоит из корпуса, одного или нескольких пьезоприводов (пьезоактюаторов) и различных элементов, поддерживающих их работу. Привод (актюатор) – общее название приборов, которые преобразуют входную энергию в механическую энергию. Пьезопривод (piezoactuator) – преобразует электрическую энергию в механическую (напряжение и заряд в силу и движение).
При конструировании пьезодвигателей учитывают недостатки пьезокерамики: нелинейность, крип (creep – ползучесть) – запаздывание реакции на изменение величины управляющего поля, гистерезис – неоднозначность зависимости удлинения от направления изменения электрического поля (до 5 – 25 % в зависимости от материала). Для уменьшения влияния гистерезиса на точность позиционирования пьезодвигателем выбирают пьезоматериалы с меньшим гистерезисом, а также применяют системы управления с датчиками положения и обратной связью [17]. В каждом случае необходимо учитывать особенности электромеханического преобразования энергии пьезодвигателями нано- и микроперемещений [18].
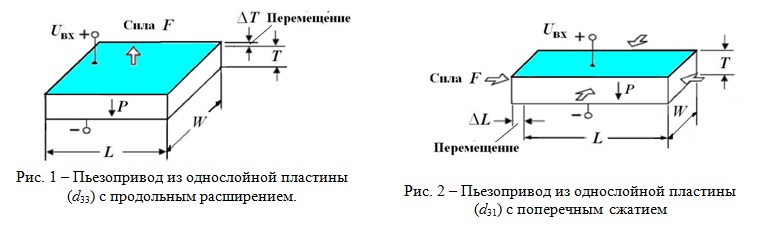
По принципу действия пьезоприводы можно разделить на следующие виды: ударного действия (вибропьезоприводы), деформационного действия (шаговые) и силового действия (силовые двигатели) [1]. В первом случае подвижная часть приводится под действием ударов передаваемых от пьезоэлемента с частотой собственных колебаний (резонансной частотой). Во втором – подвижная часть последовательно перемещается с определённым шагом вследствие изменения напряжённо-деформированного состояния его элементов под действием пьезоэлементов. В третьем – силовое воздействие непосредственно (или через передаточное звено) передаётся на объект от пьезоэлемента, при этом осуществляются угловые или линейные перемещения в ограниченном диапазоне. В зависимости от используемых направлений пьезоэффектов, конструкции, предназначения и т.п. широкое распространение получили следующие виды пьезоактюаторов: защемляемые изгибные пьезокерамические биморфы и мультиморфы (мода d31), моноблочные и пакетные (осевые – мода d33, поперечные – мода d31), дифференциальные,изгибно-натяжные, сдвиговые, ламинарные полосковые, с интегрированным рычажным усилителем перемещения,управляемые пьезофлексерные, трубчатые [4].
На рис. 1 показан пьезопривод из однослойной пластины (d33) пьезоматериала. При приложении внешнего электрического поля той же поляризации и ориентации, что и направление поляризации пластины, происходит расширение пьезоматериала по толщине или вдоль оси поляризации. Пьезопривод из однослойной пластины (d31) с поперечным сжатием представлен на рис. 2. Здесь сжатие происходит по направлениям, перпендикулярным направлению поляризации. При смене полярности направление движения меняется на противоположное.
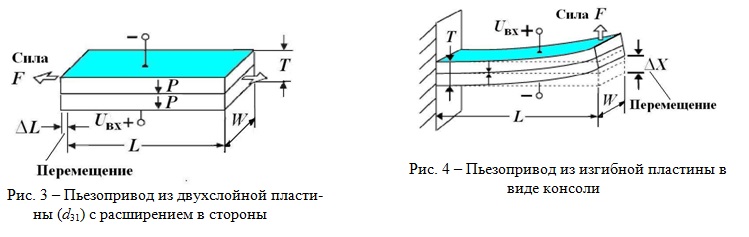
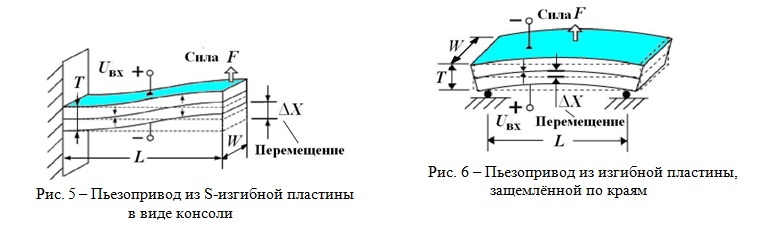
 Двухслойные пьезоприводы могут быть работающими на удлинение (рис. 3). Между пьезоэлектрическими пластинами устанавливается прокладка из ламината, которая добавляет механическую прочность и жёсткость, но уменьшает перемещение. Двухслойные приводы называют по числу пьезопластин (слоёв). В действительности слоёв материалов больше, обычно девять: четыре электродных слоя, два пьезокерамических слоя, два слоя клея, прокладка из ламината. При конфигурации для параллельной работы прокладку делают двухслойной, что даёт возможность уменьшить напряжение возбуждения на половину. В двухслойных приводах обычно используется движение вдоль одной оси. Типичная величина перемещения таких приводов (рис. 3) от десятков нанометров до десятков микрон, а силы – от нескольких десятков до сотен Ньютонов. Так же двухслойные приводы могут работать на изгиб (рис. 4, 5) или скручивание (рис. 6). Многослойный привод показан на рис. 7.
Двухслойные пьезоприводы могут быть работающими на удлинение (рис. 3). Между пьезоэлектрическими пластинами устанавливается прокладка из ламината, которая добавляет механическую прочность и жёсткость, но уменьшает перемещение. Двухслойные приводы называют по числу пьезопластин (слоёв). В действительности слоёв материалов больше, обычно девять: четыре электродных слоя, два пьезокерамических слоя, два слоя клея, прокладка из ламината. При конфигурации для параллельной работы прокладку делают двухслойной, что даёт возможность уменьшить напряжение возбуждения на половину. В двухслойных приводах обычно используется движение вдоль одной оси. Типичная величина перемещения таких приводов (рис. 3) от десятков нанометров до десятков микрон, а силы – от нескольких десятков до сотен Ньютонов. Так же двухслойные приводы могут работать на изгиб (рис. 4, 5) или скручивание (рис. 6). Многослойный привод показан на рис. 7.
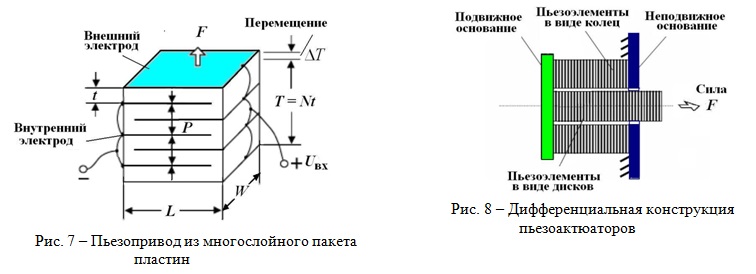
 В дифференциальных конструкциях пьезоактюаторов одна часть пьезоэлементов работает на сжатие, а другая – на расширение, при этом пьезоэлементы механически соединены так, что их перемещения складываются по абсолютной величине (рис. 8). Такие конструкции могут быть выполнены как из отдельных пьезоэлементов, так и из пакетов пьезоэлементов, а также из биморфных пьезоэлементов. Дифференциальное соединение и включение пьезоэлементов позволяет минимизировать температурную погрешность, возникающую из-за теплового расширения элементов конструкции пьезодвигателя, а также увеличить в два раза диапазон перемещений без значительного увеличения габаритных размеров и дополнительных энергозатрат.
В дифференциальных конструкциях пьезоактюаторов одна часть пьезоэлементов работает на сжатие, а другая – на расширение, при этом пьезоэлементы механически соединены так, что их перемещения складываются по абсолютной величине (рис. 8). Такие конструкции могут быть выполнены как из отдельных пьезоэлементов, так и из пакетов пьезоэлементов, а также из биморфных пьезоэлементов. Дифференциальное соединение и включение пьезоэлементов позволяет минимизировать температурную погрешность, возникающую из-за теплового расширения элементов конструкции пьезодвигателя, а также увеличить в два раза диапазон перемещений без значительного увеличения габаритных размеров и дополнительных энергозатрат.
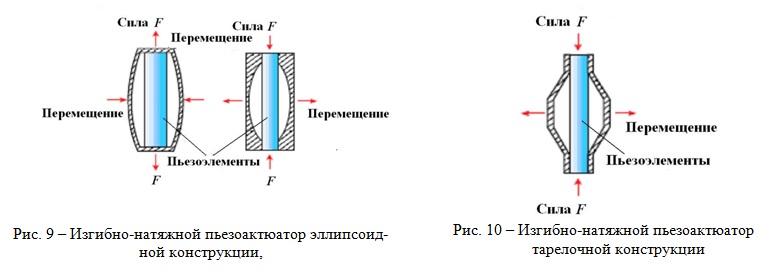
Изгибно-натяжные пьезоактюаторы сочетают в себе лучшие характеристики многослойных актюаторов и двухслойных актюаторов. Такие устройства преобразуют небольшой толщинный сдвиг многослойного пьезокерамического элемента в деформацию изгиба двух металлических пластин, охватывающих элемент. Благодаря механическому усилению такого преобразования изгибно-натяжные актюаторы демонстрируют многократное увеличение сдвига по сравнению с многослойными актюаторами, а также достигают значительно больших показателей силы и скорости реакции, по сравнению с эквивалентными двухслойными изгибными актюаторами. Обычно такие устройства имеют резонансную частоту от 300Гц до 3кГц. В зависимости от формы их конструкции (см. рис. 9, 10) изгибно-натяжные актюаторы получили название эллипсоидные и тарелочные.
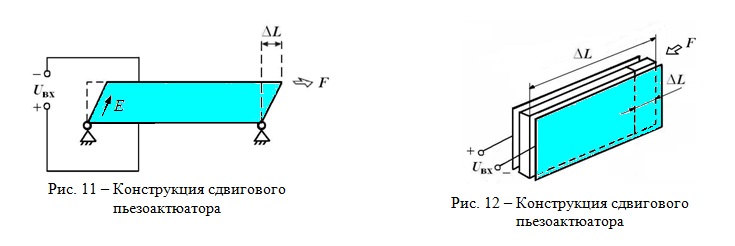
 Сдвиговые пьезоактюаторы способны генерировать большую блокирующую силу при значительном сдвиге (рис. 11). Находят применение в качестве пьезоэлектрических линейных моторов, а также как одноосевые и двухосевые позиционирующие элементы. Ламинарные полосковые пьезоактюаторы – это актюаторы сжатия. Активный материал этих актюаторов представляет собой полоски пьезокерамики. Сдвиг в таких актюаторах происходит в направлении, перпендикулярном направлению поляризации и приложенному электрическому полю (рис. 12).
Сдвиговые пьезоактюаторы способны генерировать большую блокирующую силу при значительном сдвиге (рис. 11). Находят применение в качестве пьезоэлектрических линейных моторов, а также как одноосевые и двухосевые позиционирующие элементы. Ламинарные полосковые пьезоактюаторы – это актюаторы сжатия. Активный материал этих актюаторов представляет собой полоски пьезокерамики. Сдвиг в таких актюаторах происходит в направлении, перпендикулярном направлению поляризации и приложенному электрическому полю (рис. 12).
Трубчатые пьезоактюаторы работают на принципе явления сужения внутреннего сечения полого пьезокерамического цилиндра. Стенки цилиндра снаружи и изнутри покрываются электродами, и он работает на основе поперечного пьезоэффекта. Электрическое напряжение, приложенное между внешним и внутренним электродами, вызывает осевое и радиальное сжатие пьезокерамики.
Управляемые пьезофлексерные актюаторы – представляют собой сложные позиционирующие устройства на базе пьезоактюатора с интегрированным в него флексером. Флексеры – это устройства, практически не имеющие трения и стрикции, принцип работы которых основан на эластичной деформации (флексинге) твердого материала, например, стали. Применяются в тех случаях, когда требуется получить исключительно прямое перемещение по одной и более осям (до шести осей) с нанометрическим отклонением от идеальной траектории. Такие устройства часто используют с рычажным усилителем перемещения, что позволяет увеличить максимальный ход пьезоактюатора почти в 20 раз, в результате чего он может составлять несколько сотен микрон.
Особый интерес представляют шаговые пьезодвигатели, которые используются для манипуляции объектами, с пошаговым их перемещением. Они находят широкое применение в атомно-силовой и туннельной микроскопии, поскольку позволяют с точностью до нанометров позиционировать исследуемый объект. Отличительной особенностью конструкций шаговых пьезодвигателей является наличие кроме рабочих пьезоэлементов фиксирующих устройств, в качестве которых могут быть тоже пьезоэлементы [19]. Такие пьезодвигатели могут содержать одиночные, биморфные и пакетные пьезоактюаторы. Фиксирующие устройства фиксируют подвижную часть двигателя в его рабочем цикле пошагового перемещения. Они позволяют создавать (совместно с рабочими пьезоактюаторами) и снимать напряжённо-деформированные состояния в деформируемых подвижных элементах конструкции пьезодвигателя. При снятии напряжённо-деформированного состояния фиксирующим устройством подвижный элемент пьезодвигателя удлиняется и перемещает объект на один шаг. Для двух и трёх координатного перемещения совмещают два и три пьезопривода (пьезоактюатора). Минимальный шаг перемещений пьезоприводов зависит от свойств и размеров пьезоэлементов, величины управляющего электрического напряжения. Плавность хода пьезопривода возрастает с уменьшением шага и увеличением частоты следования управляющих импульсов.
В последнее время активно развиваются резонансные ультразвуковые пьезодвигатели, которые являются современной альтернативой двигателям постоянного тока, они также известны как вибрационные двигатели. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами.
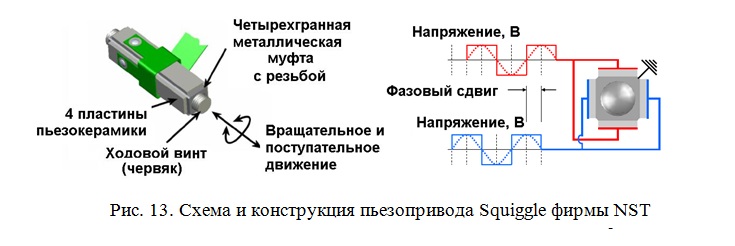
На рис. 13 показаны схема и конструкция резонансного пьезопривода Squiggle фирмы NST[20–23]. Основными элементами пьезопривода являются: четырёхгранная металлическая муфта (из немагнитного материала) c внутренней резьбой, ходовой винт (червяк) и четыре пластины пьезокерамики. Пластины пьезокерамики прикреплены на гранях металлической муфты, червяк вкручен в металлическую муфту. При подаче двухфазных напряжений на противоположные пары пластин пьезокерамики возникают механические колебания, которые передаются металлической муфте. Если есть сдвиг фаз между подаваемыми электрическими напряжениями, то на границе соприкасающихся поверхностей муфты и червяка возникают силы сдавливания с поворотом. В результате червяк вращается и линейно перемещается относительно муфты. Меняя сдвиг фаз можно изменять направление движения винта (червяка). Эти пьезоприводы работают в резонансном режиме на частотах 30 – 200 кГц в зависимости от их размеров. Минимальные габариты пьезопривода 1,55 x 1,55 x 6 мм, температурный диапазон работы от минус 30 до 70 градусов Цельсия, потребляемая мощность ~ 500 мВт, диапазон линейных перемещений до 5 – 30 мм, разрешение 0,5 мкм. Такие приводы применяются для объективов фото и видеокамер.
 В России постепенно начинают развиваться перспективные производства МЭМС, НЭМС и наноструктурированных материалов. Однако этот процесс идёт достаточно сложно, в том числе по причине отсутствия отечественного тестового, технологического и сборочного оборудования с нанометровым разрешением.
В России постепенно начинают развиваться перспективные производства МЭМС, НЭМС и наноструктурированных материалов. Однако этот процесс идёт достаточно сложно, в том числе по причине отсутствия отечественного тестового, технологического и сборочного оборудования с нанометровым разрешением.
На рис. 14. представлена конструкция отечественного дорезонансного пьезодвигателя, созданного в ФГУП ФНПЦ «ПО «Старт» им. М.В. Проценко» [3]. Данный двигатель имеет Н-образную группу пьезоэлементов (ПЭ) – два тормозных ПЭ с наконечниками из износостойкой керамики и один ходовой. Тормозные ПЭ управляются квазипрямоугольными сигналами, а ходовые – пилообразными. Благодаря этому имеется возможность реализовать принцип дробления шага и останавливать пьезодвигатель на любом такте напряжения, формирующего ходовую пилу.
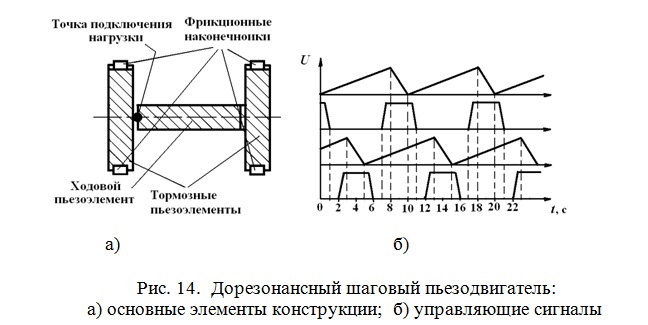 Рабочий цикл такого пьезодвигателя состоит из нескольких этапов. Первый тормозящий актюатор приводится в действие и зажимает один конец движителя. На актюатор-движитель подается напряжение, и он приводится в действие – удлиняется. Второй тормозящий актюатор после максимального шага движителя зажимает его. С первого тормозящего актюатора снимается напряжение, и он разблокирует движитель. Движитель, с которого снимается напряжение, сжимается в направлении передвижения и т.д.
Рабочий цикл такого пьезодвигателя состоит из нескольких этапов. Первый тормозящий актюатор приводится в действие и зажимает один конец движителя. На актюатор-движитель подается напряжение, и он приводится в действие – удлиняется. Второй тормозящий актюатор после максимального шага движителя зажимает его. С первого тормозящего актюатора снимается напряжение, и он разблокирует движитель. Движитель, с которого снимается напряжение, сжимается в направлении передвижения и т.д.
При использовании описанной схемы пьезодвигателя благодаря применению ряда новых конструктивных решений удалось минимизировать габариты пьезодвигателя. На рисунке 15 представлен макетный образец пьезодвигателя.
Преимущества пьезодвигателей: высокий КПД (до 90% и более), большое усилие (не требуются редукторы), малые габариты и масса (по сравнению с электромагнитными двигателями), возможность работы при криогенных температурах и в условиях вакуума, возможность обеспечить малые угловые (единицы угловых секунд) и линейные перемещения (< 1 нм) и др. [1, 3, 24].
Области применения прецизионных пьезоприводов стремительно расширяются: нано- и микроманипуляторы, микророботы, нано- и микроскопия, нано- и микротехнологии (микролитография), биотехнологии, астрономия, космические исследования, метрология, тестовое оборудование для полупроводниковой промышленности, тестирование дисковых накопительных устройств, приборы управления лазерным лучом (приводы лазерных резонаторов), топливно-распределительные системы бензиновых и дизельных двигателей, компенсаторы вибрации и т.д. [1–6].

Библиографический список
- Бардин В.А., Васильев В.А. Двигатели для нано- и микроперемещений / В кн.: Проблемы автоматизации и управления в технических системах: сб. ст. Международной научно-технической конференции (г. Пенза, 23 – 25 апреля 2013 г.) // под ред. д.т.н., проф. М. А. Щербакова. – Пенза: Изд-во ПГУ, 2013. – С.259 – 263.
- Амельченко А.Г., Бардин В.А., Васильев В.А., Немков А.Е., Чернов П.С. Прибор для механических тестов с нанометровым разрешением / В кн.: Проблемы автоматизации и управления в технических системах: сб. ст. Международной научно-технической конференции (г. Пенза, 23 – 25 апреля 2013 г.) // под ред. д.т.н., проф. М. А. Щербакова. – Пенза: Изд-во ПГУ, 2013. – С.309 – 312.
- Амельченко А.Г., Бардин В.А., Васильев В.А., Немков А.Е., Чернов П.С. Прибор прецизионного позиционирования с нанометровым разрешением // Информационные материалы в науке и производстве (ИТНП-2013): Материалы Всероссийской научно-технической конференции. 5–6 июня 2013 г. Самар. гос. техн. ун-т.– Самара, 2013.–С.3–6.
- Бардин В.А., Васильев В.А. Пьезоактюаторы для измерительных и управляющих систем // Информационные материалы в науке и производстве (ИТНП-2013): Материалы Всероссийской научно-технической конференции. 5–6 июня 2013 г. Самар. гос. техн. ун-т. – Самара, 2013. – С.17–20.
- Бардин В.А., Васильев В.А. Принципы построения пьезоактюаторов для нано- и микроперемщений // В сб.: «Опто-, наноэлектроника, нанотехнологии и микросистемы» : Труды XVI международной конференции. – Ульяновск: УлГУ, 2013.–С.316–317.
- Васильев В. А., Бардин В.А. Пьезоприводы нано- и микроперемещений // В сб. материалов науч.-техн. конф. студентов, аспирантов и молодых ученых, посвящ. 350-летию г. Пензы, в рамках Всерос. науч. школы «Волоконно-оптические, лазерные и нанотехнологии в наукоемком приборостроении» (г. Пенза, 1-3 октября 2013 г.) / под ред. проф. Т. И. Мурашкиной. – Пенза : Изд-во ПГУ, 2013. – С. 235 – 236.
- Уорден К. Новые интеллектуальные материалы и конструкции. Свойства и применение. – М.: Техносфера, 2006. – 224 с.
- Шарапов В.М., Мусиенко М.П., Шарапова Е.В. Пьезоэлектрические датчики. – М.: Техносфера, 2006. – 632 с.
- А.с. СССР № 1454378 Датчик пульса / Васильев В.А., Тихонов А.И., Дегтярев Д.Г., Курепов М.Е.//МКИ А 61 В 5/02. Бюл. № 4 от 30.01.1989 г.
- Васильев В.А., Веремьёв В.А., Тихонов А.И. Исследование влияния частотных факторов и параметров на пьезоэлектрические датчики давления // Известия Томского политехнического университета. – Томск, 2003. – Т.306, №4. – С.103–108.
- Головнин В.А., Каплунов И.А., Малышкина О.В., Педько Б.Б., Мовчикова А.А. Физические основы, методы исследования и практическое применение пьезоматериалов. – М.: Техносфера, 2013. – 272 с.
- Панич А.Е. Пьезокерамические актюаторы. – Ростов на Дону: РГУ, 2008. – 159 с.
- Сафронов А. Пьезокерамические пакетные и моноблочные актюаторы / Сафронов А., Климашин В., Парфенов Б., Ярошевич В., Никифоров В. // Компоненты и технологии. – 2002, № 6. – URL: http://www.masters.donntu.edu.ua/2011/etf/kitmane/library/pa.pdf
- Mackeyville P.A. Piezoceramics Actuator: Principles and Applications. APC International, Ltd, 2002.
- Бобцов А.А., Бойков В.И., Быстров С.В., Григорьев В.И. Исполнительные устройства и системы для микроперемещений. – С.-Петербург: ИТМО, 2011. – 131 с.
- Афонин С.М. Особенности электромеханического преобразования энергии пьезодвигателями наноперемещений // Приборы и системы. Управление, контроль, диагностика. – М.: Научтехлитиздат, 2012. – С. 23 – 28.
- А.с. СССР № 1800575 Пьезоэлектрический привод / В.В.Кислов, В.И.Панов, С.И. Васильев, И.Э.Невернов, С.Д.Алекперов, А.Г.Амельченко, А.А.Есин, Е.Ф. Балакирев // H02N2/00, H01L41/09. Опубликовано 07.03.1993 г.
- Henderson D.A., Shaertl L. Piezoelectric motors move miniaturization forward / New Scale Technologies, Victor, NY. – – URL: http://www.newscaletech.com
- Henderson D.A. Novel piezo motor enables positive displacement microfluidic pump / New Scale Technologies, Victor, NY// NSTI Nanotech, 2007.
- Васильев В.А., Веремьёв В.А., Тихонов А.И. Влияние частотных факторов и параметров на информативный сигнал пьезоэлектрических датчиков давления // Датчики и системы. – М., 2003. – № 8. – С.5–9.
- Васильев В.А., Тихонов А.И. Оптимизация пьезоэлектрических датчиков механических величин Известия высших учебных заведений. Электромеханика. – Новочеркасск, 2003.– № 1.– С. 80–81.
- Henderson D.A. Simple ceramic motor…Inspiring smaller products / New Scale Technologies, Victor, NY// Actuator 2006, 10-th International conference on new actuators. 14-16 June 2006. Bremen, Germany (Late Submission).
- Самарин А. Миниатюрные линейные пьезоэлектрические двигатели // Компоненты и технологии. – М., 2006. – № 6. – URL: http://www.kit-e.ru/assets/files/pdf/2006_10_36.pdf
- Zhang B., Zhu Z. Developing a linear piezomotor with nanometer resolution and high stiffness. IEEE/ASME Trans. Mechatronics, Vol.2, 1997, P.22–29
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.