АВТОМАТИЧЕСКАЯ НАСТРОЙКА ПИД-РЕГУЛЯТОРА ЦИФРОВОГО ТЕРМОСТАБИЛИЗАТОРА ДЛЯ ИНКУБАТОРА
Санкт-Петербургский государственный политехнический университет
доцент кафедры «Автоматы», кандидат технических наук
Аннотация
Представлена динамическая модель камеры инкубации как тепловой эквивалентной схемы с сосредоточенными параметрами. Рассмотрена аппроксимация исходной модели системой первого порядка. Описана автоматическая настройка ПИ-регулятора на основе аналитического вычисления коэффициентов по результатам идентификации параметров приближенной модели. Рассмотрен вопрос влияния нелинейности характеристики фазового симисторного регулятора мощности. Проведено моделирование процедуры идентификации параметров и системы с замкнутой обратной связью.
Ключевые слова: инкубатор, ПИД-регулятор, цифровой термостабилизатор
AUTOMATIC PID-CONTROLLER TUNING FOR DIGITAL INCUBATOR THERMOSTAT
St. Petersburg State Polytechnical University
Ph.D, Associate Professor
Abstract
The dynamic model of incubation chamber as a thermal equivalent circuit with lumped parameters is given. Considered an approximation of the initial model by first order system. Automatic tuning of the PI controller procedure based on an analytical calculation of the coefficients and parameter identification of the approximate model is presented. The question of the influence of non-linear characteristic of the phase triac power regulator is considered. The simulations of parameter identification procedure and closed loop system are presented.
Библиографическая ссылка на статью:
Борисевич А.В. Автоматическая настройка ПИД-регулятора цифрового термостабилизатора для инкубатора // Современная техника и технологии. 2014. № 6 [Электронный ресурс]. URL: https://technology.snauka.ru/2014/06/4044 (дата обращения: 31.07.2026).
Введение
Искусственная инкубация – это технология, которая имеет очень долгую историю и играет важнейшую роль в промышленном птицеводстве. Под действием температуры и других климатических факторов эмбрион внутри яйца развивается из одной клетки до практически сформировавшегося организма. Основное отличие искусственной инкубации от естественной заключается в том, что теплообмен осуществляется не контактным способом, а с помощью конвекции и излучения от нагревателя.
Подбор оптимальных климатических условий для инкубации яиц разных пород птиц – отдельная область исследований [1,2,3,4]. Тем не менее, установлено, что ключевыми факторами являются: температура, влажность, вентиляция и переворот яиц в процессе инкубации. Оптимальный режим инкубации для куриных яиц достигается при температуре 37,5 °C, влажности 60 %, достаточной вентиляции для поддержания процентного содержания кислорода не менее 20 % и углекислого газа не более 0,5 %. Применяются также специфические условия, заключающиеся в кратковременном охлаждении яиц, опрыскивании водой, изменения температуры инкубации согласно заданному профилю.
В настоящей работе обсуждается частная техническая задача разработки терморегулятора для малогабаритного инкубатора. Большинство источников (например, [1,3]) содержат следующие рекомендации по поддержанию температуры:
- точность регулирования – не менее 0,5 °C, оптимальным является 0,2 °C;
- как можно более быстрый выход на установленный температурный режим;
- отсутствие перерегулирования – превышения температуры над заданным значением при переходных процессах.
Если точность регулирования в большей степени зависит от применяемого датчика температуры и способа измерения, то два последних требования относятся к динамическому поведению терморегулятора и, в действительности, противоречат друг другу. Поэтому оптимальная настройка регулятора является не менее важным фактором нормальной работы инкубатора.
В отечественной научной и технической литературе этот вопрос обсуждался лишь фрагментарно. Достаточно полное исследование проведено в диссертационной работе [5], в частности, рассмотрена динамика инкубационной камеры [6] и терморегулятор [7]. Однако, вопрос автоматической настройки цифрового терморегулятора не был проработан в должной мере. В технической литературе, например в [8,9], автоматическая настройка также не реализовывалась. Отсюда, решаемая задача имеет достаточно актуальное прикладное значение.
Структура системы регулирования температуры
Схематично структура системы показана на рисунке 1. Установка состоит из камеры инкубации с нагревателем (предположительно, лампа накаливания), симисторного регулятора мощности с фазовым управлением, ПИД-регулятора, термодатчика и формирователя сигнала ошибки , где
– температура воздуха в инкубаторе,
– уставка температуры.
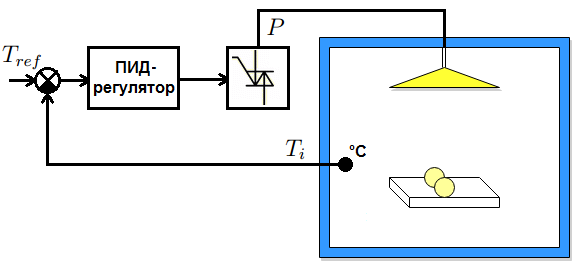
Рисунок 1. Структурная схемы системы регулирования температуры.
Динамическая модель
Для моделирования динамических процессов теплообмена можно составить модель с сосредоточенными параметрами, состоящую из следующих элементов (рисунок 1): нагреватель, воздушная среда в камере инкубатора, лоток с яйцами, стенки инкубатора и внешняя среда.
Обозначим следующие параметры: – температура окружающей среды,
– тепловой поток через стенки инкубатора,
– температура воздуха в камере инкубатора,
– тепловой поток от нагревателя к воздуху,
– температура лотка,
– тепловой поток от воздуха к лотку,
– мощность нагревателя.
Для получения динамической модели процесса применим метод электротепловой аналогии. Введем в рассмотрение следующие величины, характеризующие тепловые свойства составляющих модели:
- , где:
– масса воздуха в камере,
– удельная теплоемкость воздуха;
- , где:
– масса лотка с яйцами,
– удельная теплоемкость лотка (усредненная);
- – тепловое сопротивление контакта воздух-яйцо;
- , где
– площадь поверхности камеры инкубатора,
– коэффициент теплопроводности через стенки корпуса.
Используя введенные параметры, можно составить схему тепловой цепи (рисунок 2), которая отражает тепловые процессы в системе. Тепло от нагревателя передается окружающему воздуху (тепловой поток ), имеющему тепловую емкость
, а также выходит наружу (тепловой поток
) через тепловое сопротивление
. Нагретый воздух отдает тепло (тепловой поток
) лотку с тепловой емкостью
, через сопротивление
.
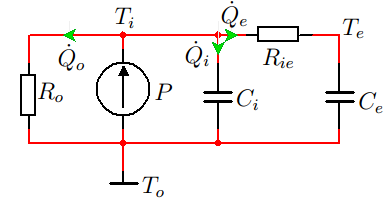
Рисунок 2. Эквивалентная схема тепловой цепи.
Можно записать следующие уравнения, моделирующие данный процесс:
После некоторых преобразований, получаем следующую передаточную функцию системы по отношению к температуре воздуха :
где – оператор Лапласа.
Эта передаточная функция получена при нулевых начальных значениях температур. Температура воздуха в камере инкубатора с учетом начальных условий определяется следующим образом:
Синтез регулятора
Поскольку полученная модель второго порядка строго апериодическая, то для реализации регулятора имеет смысл аппроксимировать ее передаточной функцией первого порядка:
Из соображений равенства установившихся значений, получаем .
Для вычисления преобразуем знаменатель
к стандартному виду:
где
Тогда постоянная времени может быть оценена следующим образом:
Поскольку управление системой первого порядка может быть реализовано без использования дифференциальной компоненты регулятора, то в этой частной задаче возможно применение ПИ-регулятора, передаточная функция которого записывается в виде:
Передаточная функция все системы с замкнутой обратной связью, образованной регулятором и объектом управления
, выражается так:
Коэффициенты ПИ-регулятора должны быть подобраны таким образом, чтобы обеспечить равенство знаменателя желаемому характеристическому уравнению , определяющему динамику системы в целом. Отсюда получается:
Для оптимальности переходных процессов (отсутствия перерегулирования и насыщения управляющего входа), имеет смысл выбрать параметры следующим образом:
Таким образом, зная постоянную времени и коэффициент передачи
объекта управления, получаем
регулятора.
Идентификация параметров модели
Задача ставится следующим образом: на основе эксперимента определить параметры объекта управления. В этом параграфе обозначим вход объекта управления
, который физически является мощностью нагревателя, и выход
, который выражает температуру в камере инкубатора. Предполагается, что до включения нагревателя температура всех частей системы равнялась температуре внешней среды
.
Подадим ступенчатое тестовое воздействие на вход объекта управления . Наблюдаемая реакция выхода запишется в виде:
(1)
Пусть – измеренный отклик объекта управления на ступенчатое воздействие
. Зададим вектор дискретных уровней выхода
, где
– фиксированный шаг. На основе вектора
можно определить вектор
такой, что
– минимальное значение времени, для которого выполняется
. Таким образом, вместо записи и хранения всего сигнала
определяется лишь вектор
моментов времени, когда
превышает заранее определенные фиксированные уровни.
В конце эксперимента, после установления постоянного значения на выходе объекта управления, зафиксируем измеренное установившееся значение: . Из уравнения (1) получается при
:
Для определения постоянной времени можно переписать (1) в виде
отсюда после логарифмирования
Подставляя значения из векторов и
, получаем
Обозначив выражение в правой части как вектор
тогда оценка может быть получена на основе линейной регрессии:
где – соответствующие средние значения,
– количество измерений в векторах
.
Линеаризация объекта управления по входу
Применение тиристорного (симисторного) регулятора мощности добавляет существенную нелинейность в систему. Известно [10], что мощность , выделяемая в нагрузке, зависит нелинейно от угла фазы
открытия симистора:
`
(2)
Можно предложить два способа реализации преобразования управляющего воздействия:
- положив грубо, , можно получить следующую линейную трансформацию:
(3)
при этом эффекты нелинейности будут скомпенсированы ПИ-регулятором как возмущения;
- использовать табличное инверсное соответствие такое, что
– мощность по (2) для заданного
.
Моделирование
Для проверки концепции была разработана модель системы с обратной связью в MATLAB/Simulink, собранная на основе блоков Simscape.
Начальная температура всех компонентов системы выбрана как °C (300 K). Рассматривалась кубическая камера инкубации габаритными размерами 1 м по всем измерениям. По условиям моделирования, в инкубаторе содержится 40 яиц, массой 50 г каждое и площадью 68 кв.см. В качестве остальных параметров модели выбраны следующие значения:
,
,
,
,
,
,
,
,
,
. Реакция системы на входное воздействие
Вт показана на рисунке 3. Точки
, выбранные в соответствии с описанным алгоритмом идентификации, выделены на рисунке красным.

Рисунок 3. Отклик системы на ступенчатое входное воздействие и точки для идентификации параметров модели.
В результате идентификации получены следующие параметры аппроксимации первого порядка: . Реакция системы первого порядка практически не отличается от исходной модели.
По соотношениям (0) были вычислены коэффициенты ПИ-регулятора: . Рассматривалось два варианта пересчета значения выхода ПИ-регулятора в угол открытия симистора: линейное преобразование (3) и полная инверсия
. Результаты моделирования показаны на рисунке 4, на котором показаны следующие кривые
– уставка температуры,
– температура в инкубаторе при применении преобразования (3),
– температура при применении инверсии (2), т.е. полной линеаризации модели. Как видно из полученных результатов, нелинейная инверсия (2) не дает преимуществ перед преобразованием (3), а поскольку (3) реализуется гораздо проще, поэтому с практической точки зрения такой вариант более предпочтителен.

Рисунок 4. Моделирование процесса регулирования температуры: сравнение линейного преобразования для зависимости фаза открытия тиристора-мощность и ее полной инверсии.
Заключение
В настоящей работе рассмотрены теоретические аспекты разработки интеллектуального терморегулятора для малогабаритного инкубатора. Разработка модель второго порядка для динамики температуры в камере инкубатора. Показано, что такая модель может быть упрощена до системы первого порядка. Разработан алгоритм идентификации параметров модели, на основе которых вычисляются коэффициенты ПИ-регулятора, что реализует его автоматическую настройку по результатам применения ступенчатого сигнала. Проведено моделирование системы с замкнутой обратной связью. На основе результатов моделирования показано, что линеаризация статической характеристики симисторного (тиристорного) регулятора мощности не требуется для обеспечения термостабилизации.
Дальнейшая работа будет сосредоточена на проведении натурных экспериментов, а также оптимизации предложенных алгоритмов для аппаратной реализации в микроконтроллере.
Библиографический список
- Molenaar R. et al. Meeting embryonic requirements of broilers throughout incubation: a review //Revista Brasileira de Ciencia Avicola. – 2010. – Т. 12. – №. 3. – С. 137-148.
- Cartwright A. L. Incubating and hatching eggs [Электронный ресурс] // Режим доступа: http://aggie-horticulture.tamu.edu/organic/files/2011/02/lee-cartwright-incubating-and-hatching-eggs.pdf – Загл. с экрана (дата обращения: 20.05.2014).
- Маковеева А. С., Лоретц О. Г. Сравнительный анализ выводимости цыплят-бройлеров отечественной и зарубежной селекции в условиях Среднего Урала // Молодежь и наука, 2013 год, №1
- Тагиров М.Т., Огурцова Н.С., Терещенко А.В. Аналіз проблем выводимости инкубируемых яиц // Птахівництво: Міжвід. темат. наук. зб. ІП УААН. – Бірки, 2008. – Вип. 63.
- Гветадзе С.В. Имитирующие элементы и управляющие устройства для обеспечения нестационарных температурных режимов инкубации: aвтореф. дис. на соиск. уч. степ. кандидата технических наук: 05.13.05 / ЮРГТУ (НПИ) – Новочеркасск, 2010.
- Гветадзе С.В. Исследование динамических свойств инкубационного шкафа как теплового объекта управления / С.В. Гветадзе, Е.И. Фандеев // Автоматизацiя технологiчних об’ектiв та процесiв. Пошук молодих: Зб. наук.праць. III-й Мiжнар. наук.-техн. конф. аспiрантiв i студентiв, 14-15.05. 2003 г. – Донецьк: ДонНТУ, 2003. –С. 75-76.
- Гветадзе С.В. Микропроцессорная система управления термоконтрастным режимом инкубации / С.В. Гветадзе, Е.И. Фандеев // Автоматизацiя технологiчних об’ектiв та процесiв. Пошук молодих: Зб. наук.праць. II-й Мiжнар. наук.-техн. конф. аспiрантiв та студентiв, 25-26 апр. 2002 г. –Донецьк: ДонНТУ, 2002. –С. 42-44.
- Борисевич А.В. Цифровое устройство управления инкубатором [Электронный ресурс] // Режим доступа: http://www.radioland.net.ua/sxemaid-341.html – Загл. с экрана (дата обращения: 20.05.2014).
- Филипович А.И. Блок автоматического управления инкубатором // Режим доступа: http://sokol.radioliga.com/15.htm – Загл. с экрана (дата обращения: 20.05.2014).
- Power Control with Thyristors and Triacs: Chapter 6 in Power Semiconductor Applications Philips Semiconductors // Режим доступа: http://www.nxp.com/documents/application_note/APPCHP6.pdf – Загл. с экрана (дата обращения: 20.05.2014).
- Инкубация яиц. Справочник. / Ю.З. Буртов, Ю.С. Голдин, И.П. Кривопишин М.: Агропромиздат, 1990. – 239 с.
Все статьи автора «Борисевич Алексей Валерьевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.