Дрон – мобильный, автономный аппарат, запрограммированный на выполнение каких-либо задач.
Дроны представляют собой разновидность летающих роботов с возможностью передачи частичного, либо полного управления человеку. Впервые подобные роботы применялись в 1983 году армией США, где от них требовались задачи нахождения баз, лучших путей отхода или глубокая разведка. Применение дронов, таким образом, помогло сохранить множество жизней, и минимизировать ущерб в боевых действиях.
Однако время идет, и теперь подобные технологии становятся общедоступными для множества потребителей, и соответственно к дронам начинают предъявлять более специфичный спектр задач. В наши дни они применяются спасателями в случае чрезвычайных ситуаций, после катастроф, если необходимо провести осмотр больших территорий, для поиска выживших. Также с помощью них производится съемка объектов, погрузо-разгрузочные работы на больших высотах, где затруднен проход человека.
Применение их в сельском хозяйстве, также имеет свой потенциал. Для примера, рассмотрим конструкцию и технические характеристика наиболее распространенного на данное время дрона модели AR.Drone 2.0.
Конструкция его (Рис.1) как и любого летающего дрона, представляет из себя, защитный кожух 1, внутри которого находится бортовая ЭВМ с датчиками положения, системой управления и собственным программным обеспечением, доступным для корректировки. Для маневрирования в воздухе, и набора высоты дрон использует винты 2, количество и мощность которых варьируется в зависимости от модификации. Чтобы человек-оператор мог получать сигналы от дрона, и корректировать его движение, робот снабжен web-камерой 3 и системой беспроводного соединения компьютером оператора, радиус взаимодействий которых также может варьироваться. Чтобы предотвратить поломку винтов, имеется защитный корпус 4. Для того чтобы дрон мог захватывать и перетаскивать вещи, имеются крепежные элементы 5 находящиеся под защитным кожухом.

Рисунок 1 – AR.Drone 2.0
Представленный дрон имеет следующие интересующие нас технические характеристики (таблица 1).
Таблица 1 – Технические характеристики AR.Drone 2.0
|
Характеристика |
Значение |
| Максимальная скорость полета, км/ч. |
18 |
| Масса, кг. |
0,89 |
| Размеры, см. |
52,5х51,5 |
| Радиус работы беспроводной связи, м. |
110 |
| Максимальный переносимый груз, кг. |
8 |
| Емкость аккумулятора, А*ч. |
1000 |
Естественно, данные характеристики могут варьироваться в зависимости от конструкции. Дрону свойственно и автоматическое управление. На рисунке 2 приведены примеры траекторий полета робота, который он может выполнять без участия оператора, ориентируясь лишь на собственную систему управления, и собственный выбор возможности преодоления преграды, либо выполнения задания.

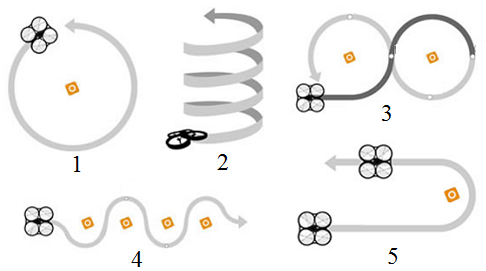
Рисунок 2 – Возможные виды траекторий движения дрона при автоматическом управлении
В итоге, после приведенной информации применение дронов в сельском хозяйстве может представляться в следующем:
- Картографическая съемка местности. Более быстродоступная и менее дорогая, чем спутниковая съемка.
- Распыление химических веществ над локальными территориями сельскохозяйственного назначения. Более точное, чем обработка полей с помощью сельскохозяйственной авиации.
-
Быстрое оперирование грузами. Доставка инструментов, семян и прочих предметов определенного веса, не учитывая сложности ландшафта.
Таким образом, были обозначены ряд направлений применения дронов. Их необходимые характеристики, и более конкретные способы применения будут рассчитаны и описаны в последующих статьях.
Библиографический список
- Кулешов В.С., Лакота Н.А.Дистанционно управляемые роботы и манипулято-ры. М.: Машиностроение, 1986.
- Лесков А.Г., Илларионов В.В., Лескова С.М., Полухин В.И. Разработка функционально-моделирующих стендов для подготовки операторов космиче-ских манипуляционных роботов // Тез. докл. 6-й МНТК "Пилотируемые полеты в космос", Звездный городок, 2005. С. 179–180.
- Медведев В.С., Лесков А.Г., Ющенко А.С.Системы управления манипуляцион-ных роботов. М.: Наука, 1978.
- Егоров И.Н., Жигалов Б.А., Кулешов В.С.Проектирование следящих систем двустороннего действия. М.: Машиностроение, 1980.
- Nohmi M.,Bock T. Contact task by force feedback teleoperation under communication time delay. Human-robot interaction. Ed. by Nilanjan Sarkar, Itech Education and Publishing, Vienna, Austria, 2007. Р. 522.
- Алферов Г.В., Кулаков Ф.М., Нечаев А.И., Чернакова С.Э.Информационные системы виртуальной реальности в мехатронике и робототехнике. СПб.: СОЛО, 2006.
Алексей Михайлович, доброго времени! С вами можно как – то связаться? По электронной почте, или в скайпе?