РЕАЛИЗАЦИЯ И ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА НЕЙРОЭМУЛЯТОРА
1ФГБУ "Фонд содействия инновациям"
Аннотация
Для получения динамики двигателя был собран прототип устройства для съема информации о параметрах двигателя и передачи в ПК для обучения нейросетевой модели и анализа результатов. Устройство построено на базе микропроцессорной платформы STM32VL Discovery и согласующих узлов. Таким образом, получив только массив входных и выходных векторов переменных динамического объекта можно получить достоверную его программную модель.
Ключевые слова: двигатель
IMPLEMENTATION AND EXPERIMENTAL VALIDATION OF A NEURAL NETWORK EMULATOR
1FSBE "The Fund for the promotion of innovation"
Abstract
To obtain the dynamics of the engine was assembled a prototype device for reading information about the parameters of the engine and transmission to PC for training neural network models and analysis results. The device is built on the basis of microprocessor platforms STM32VL Discovery and matching of nodes. Thus, after receiving only an array of input and output vectors of variables of a dynamic object, you can obtain accurate software model.
Keywords: engine
Библиографическая ссылка на статью:
Вересова О.В., Волков В.Н. Реализация и экспериментальная проверка нейроэмулятора // Современная техника и технологии. 2015. № 3 [Электронный ресурс]. URL: https://technology.snauka.ru/2015/03/6272 (дата обращения: 18.07.2026).
Исследование проходит при поддержке Фонда содействия развитию малых форм предприятий в научно-технической сфере в рамках программы УМНИК.
Нейроэмулятор – система идентификации реального динамического объекта, представляющая собой программно-аппаратный комплекс. Требуется протестировать его на экспериментальных данных.
В качестве объекта для экспериментальной проверки выбран электрический мотор-редуктор IG-42GM. В его основе электрический двигатель постоянного тока с независимым возбуждением от постоянных магнитов.
Математическая модель двигателя постоянного тока (ДПТ) описывается следующей системой уравнений:
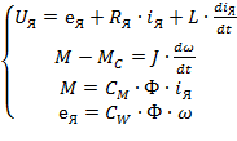 (2.1)
(2.1)
где UЯ – напряжение якорной обмотки двигателя, В;
 - электродвижущая сила якоря, В;
- электродвижущая сила якоря, В;
iЯ – ток якоря, А;
Ф – магнитный поток, создаваемый обмоткой возбуждения, Вб;
М – электромагнитный момент двигателя, Н·м;
МС
- момент сопротивления движению, Н·м;
ω – угловая частота вращения вала, рад/с;
RЯ – активное сопротивления якорной цепи, Ом;
L – индуктивность якорной цепи, Гн;
J – суммарный момент инерции привода, кг·м2;
CW – коэффициент связи между угловой частотой и электродвижущей силой;
CМ – коэффициент связи между током якоря и электромагнитным моментом.
Для того, чтобы нейронная сеть могла аппроксимировать объект, одним из ключевых условий является определение в объекте входных и выходных векторов, а также величин, описывающих состояние объекта. Удобно с этой целью рассмотреть объект как систему в пространстве состояний.
Тогда систему уравнений требуется привести к явной форме Коши, с подстановкой, тогда система уравнений примет следующий вид:
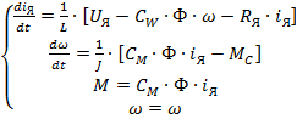 (2.2)
(2.2)
Из уравнений видно, что:
– входные переменные: UЯ и МС;
– переменные, описывающие состояние объекта: iЯ и ω;
– выходные переменные: М и ω;
Видно, что переменная скорости ω одновременно и описывает состояние объекта, и является выходной. Так же видно, что электромагнитный момент М пропорционален току iЯ, поэтому при приведении к относительным единицам, возможно использование тока iЯ в качестве выходной величины, характеризующей момент. По сглаженной кривой тока iЯ косвенно можно получить представление о моменте сопротивления МС. Возбуждение от постоянных магнитов, и магнитный поток не меняется в процессе работы двигателя, поэтому для обучения нейронной сети информация о нем не применяется.
Учитывая, что двигатель является динамическим объектом, в качестве обратных связей для нейронной сети необходимо завести информацию о выходных величинах М, ω.
По имеющейся информации была сформирована архитектура рекуррентной нейронной сети в среде Matlab. Сеть имеет один внутренний слой, состоящий из 5 нейронов. На вход и выход сети подаются соответствующие вектора переменных, снятые с двигателя. При обучении сравниваются соответствующие выходы ДПТ и сети и корректируются веса нейронов. Ниже приведена структурная схема нейросетевой модели.
Для получения динамики двигателя был собран прототип устройства для съема информации о параметрах двигателя и передачи в ПК для обучения нейросетевой модели и анализа результатов. Схема устройства приведена на рисунке 2.2.
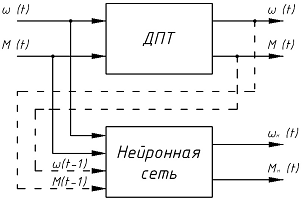
Рисунок 2.1 – Структурная схема нейросетевой модели ДПТ.
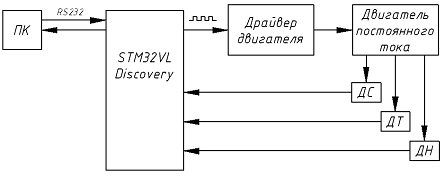
Рисунок 2.2 – Структурная схема прототипа устройства для съема информации с ДПТ
Устройство построено на базе микропроцессорной платформы STM32VL Discovery и согласующих узлов. Принцип действия следующий. Устройство формирует сигнал управления, изменяющийся согласно случайной последовательности с нормальным распределением. Управляющий сигнал подается на силовой ключ и запускает двигатель в работу. На валу искусственно создается момент сопротивления. При этом снимается аналоговая информация о скорости, токе и напряжении двигателя, которая преобразуется в цифровой вид и передается в ПК по интерфейсу RS232. В ПК формируется массив статистических данных и приводится к безразмерному виду для удобства обучения нейронной сети. 2/3 данных используется в качестве векторов для обучения нейронной сети, 1/3 используется для верификации.
Полученные данные были поданы на входы сети и произведено обучение. Сигнал тока реального двигателя iЯ пропорционален моменту сопротивления МС, и использовался также как входная величина, приведенная к безразмерному виду. В результате была достигнута ошибка обучения Еобуч = 5,6·10-4.
После этого были поданы входные векторы данных для верификации сети, так же имеющие случайный характер и приведенные к безразмерному виду. На этом этапе сравнивались выходные векторы нейронной сети и экспериментальные данные двигателя. Была достигнута ошибка верификации Евериф = 7,1·10-4.
На рисунке 2.3 приведены графики выходных векторов нейронной сети (синяя штриховая линия) и экспериментальных данных двигателя (красная сплошная линия).
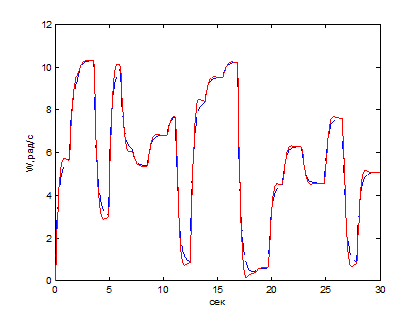
Рисунок 2.3 – График верификации обучения нейросетевой модели при случайном входном воздействии.
Экспериментальная проверка на реальном объекте наглядно демонстрирует эффективность нейросетевого эмулятора. Таким образом, получив только массив входных и выходных векторов переменных динамического объекта можно получить достоверную его программную модель. При этом не требуется наличие уточненных данных и расчетов сложных дифференциальных уравнений в процессе эксплуатации модели. Необходимо и достаточно лишь правильно первоначально сформировать архитектуру нейронной сети.
Библиографический список
- Хайкин С. Нейронные сети: полный курс, 2-е издание: Пер. с англ. – М.: Издательский дом «Вильямс». 2006. – 1104с.
- Чернодуб А.Н., Дзюба Д.А. Обзор методов нейроуправления //Проблемы программирования. -2011.- №2. –с.79-94.
- Рутковская Д., Пилиньский М.,Рутковский Л. Нейронные сети, генетические алгоритмы и нечеткие системы: Пер. с польск. И.Д. Рудинского. –М.:Горячая линия – Телеком, 2006.- 452 с.
Все статьи автора «Ольга Владимировна Вересова»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.