МОДАЛЬНОЕ УПРАВЛЕНИЕ НЕЖЕСТКИМИ ЭЛЕКТРОМЕХАНИЧЕСКИМИ СИСТЕМАМИ В МЕТАЛЛУРГИИ
1Череповецкий государственный университет, г.Череповец
Аннотация
Статья посвящена методам модального управления электроприводами агрегатов металлургического производства, позволяющим существенно улучшить показатели качества переходных процессов и характеристики установившихся режимов. Разработана математическая модель системы управления двухмассовой электромеханической системы с использованием модального регулятора желаемой эталонной формы на примере электропривода рольганга широкополосного листового прокатного стана. Проведено исследование показателей качества переходных процессов и показана высокая эффективность использования модального управления электроприводами в металлургических агрегатах с нежесткой механикой.
Ключевые слова: исследование качества переходных процессов., Модальное управление, нежесткая механика, нелинейная двухмассовая электромеханическая система, синтез модального регулятора, электропривод рольганга широкополосного стана
MODAL CONTROL OF NONRIGID ELECTROMECHANICAL SYSTEMS IN METALLURGY
1Cherepovets state University, Cherepovets
Abstract
The article is devoted to the methods of modal control of electric drive units in metallurgical industry, which can greatly advance the quality of transient processes and characteristics of steady-state regimes. The mathematical model of a control system of double-mass electromechanical systems using ideal form modal controller is desired by using the example of the broadband sheet rolling mill conveyor drive. The survey of quality indicators in transient characteristics and high efficiency while using the modal control actuators in metallurgical aggregates with non-rigid mechanics was made.
Библиографическая ссылка на статью:
Кочнев Н.В., Кочнева Т.Н. Модальное управление нежесткими электромеханическими системами в металлургии // Современная техника и технологии. 2015. № 4 [Электронный ресурс]. URL: https://technology.snauka.ru/2015/04/6296 (дата обращения: 30.07.2026).
Системы модального управления (СМУ) имеют широкие возможности в реализации высоких показателей качества протекания процессов: повышение быстродействия, устранение колебательности при наличии упругости и люфтов в кинематических связях. Поэтому вопросы оптимизации СМУ электроприводами становятся все более актуальными, им уделяется большое внимание [1].
В работе [2] описана математическая модель определения параметров модального регулятора желаемой формы, проведено исследование качественных показателей переходных режимов при управлении электродвигателем рольганга прокатного стана c традиционными структурами регуляторов систем подчиненного регулирования, оценены показатели эффективности применения модальных регуляторов в системах управления электрических приводов.
В рамках развития исследовательской работы [3] выполнен синтез модального регулятора (МР) для двухмассового электропривода с нежестким механическим звеном. Упругое звено с коэффициентом жесткости С12 связывает две массы: ротора и рабочего органа с моментами инерции J1и J2. В подобной системе при определенном соотношении параметров возможен незатухающий колебательный процесс изменения параметров режима электропривода. СМУ должна обеспечить заданные показатели в статике и динамике, устойчивость и стабилизацию движения.
Функциональная схема двухмассовой электромеханической системы с МР приведена на рис.1.
Рисунок 1 – Функциональная схема двухмассовой ЭМС с МР
Основные элементы схемы:
- усилитель У с коэффициентом усиления Ку,
- тиристорный преобразователь ТП с ЭДС Еп ,коэффициентом усиления Кп и постоянной времени Тп,
- двигатель постоянного тока независимого возбуждения Д с коэффициентом передачи Кд, сопротивлением якорной цепи Rя, электромагнитной Tэ и электромеханической Тм постоянными времени, угловой скоростью ω и моментом трения Мс1,
- модальный регулятор с коэффициентами передачи входов Ко1 - Ко5,
- упругое звено кинематическая цепь (КЦ) с коэффициентом жесткости С12,
- рабочий орган РО с моментом инерции J2 и моментом сопротивления Мс2.
Напряжение управления Uy формируется сравнением напряжения задания Uз и напряжения модального регулятора Uр.
Структурная схема моделирования этой системы приведена на рис. 2.
Рисунок 2 – Структурная схема моделирования двухмассовой ЭМС с МР
Расчеты проведены для электропривода рольганга с нежесткой механикой широкополосного стана горячей прокатки мощностью 25 кВт, 1000 об/мин. Показатели качества переходных процессов подобных устройств определяют эффективность, производительность и надежность работы прокатного оборудования.
В программном пакете MATLAB проведено моделирование процесса управляемого пуска системы без нагрузки. В качестве возмущения рассмотрен скачок нагрузки до номинала через 3 с. Графики изменения основных параметров режима (тока якоря I и скоростей двух масс w1 и w2) при управлении и возмущении приведены на рис. 3.
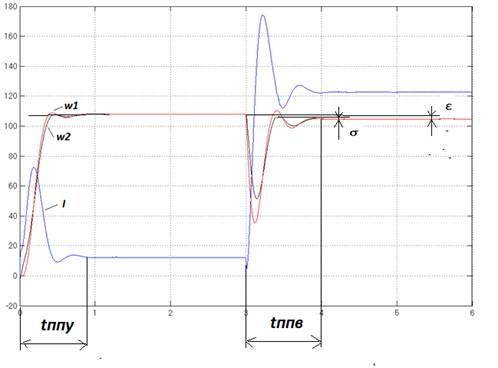
Рисунок 3 – Графики изменения параметров режима системы с МР
Результаты анализа изменения основных параметров при управлении и возмущении (время переходного процесса tпп, перерегулирование σ, статическая ошибка ε и показатель колебательности М) сведем в таблицу 1.
Перерегулирование σ характеризует динамическую ошибку начала переходного процесса, а показатель колебательности М – количество полных колебаний до достижения установившегося режима.
Таблица 1 – Основные показатели качества регулирования
|
Параметр |
Система |
При управлении | При возмущении | ||||||
| tпп,с | σ,% | ε,% | M | tпп,с | σ,% | ε,% | M | ||
|
Ток якоря |
САУ с МР |
0,7 | 45 | 0 | 1,5 | 0,8 | 25 | 0 | 1,5 |
|
Скорость w2 |
САУ с МР |
0,7 | 0 | 0 | 0,5 | 0,8 | 5 | 5 | 1,5 |
Анализ параметров и их сравнение с результатами исследования систем подчиненного регулирования [2,3] показывает, что САУ ЭМС с модальным управлением позволяет существенно улучшить показатели качества переходных процессов: повысить быстродействие и устранить колебательность.
Выводы:
1. Разработана математическая модель системы управления двухмассовой электромеханической системы с использованием модального регулятора желаемой эталонной формы на примере электропривода рольганга широкополосного листового прокатного стана.
2. Проведено исследование показателей качества переходных процессов САУ нелинейной двухмассовой ЭМС с модальным регулятором.
3. Показана высокая эффективность использования модального управления электроприводами в металлургических агрегатах с нежесткой механикой .
Библиографический список
- Синтез систем автоматического управления методом модального управления. В.В. Григорьев, Н.В. Журавлёва, Г.В. Лукьянова и др. – С-Пб: СПбГУ ИТМО, 2007. – 108 с.
- Кочнева Т.Н., Кожевников А.В., Кочнев Н.В. Модальное управление электромеханическими системами в металлургии // Вестник Череповецкого государственного университета. Научный журнал. – Череповец: ФБГОУ ВПО ЧГУ. - № 1 (45). Т.1 - 2013. - С. 11-16.
- Кочнева Т.Н., Кожевников А.В., Кочнев Н.В. Синтез модального регулятора и оценка эффективности модального управления для двухмассовых электромеханических систем // Вестник Череповецкого государственного университета. Научный журнал. – Череповец: ФБГОУ ВПО ЧГУ. - № 4 (52). Т.2 - 2013. - С. 15-22.
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.