Анализ современных систем проектирования автоматизированных систем управления технологическими процессами (АСУ ТП) и инструментальных комплексов для программирования промышленных и ПК-основанных логических контроллеров и устройств интеллектуального управления [1], таких как TRACE MODE, SIMATIC STEP 7, Twido Soft, показал, что для полноценной программной реализации структуры и алгоритмов работы многомерных нечетких интервально-логических регуляторов (МИЛР) с переменными в виде совокупности аргументов двузначной логики следует разработать специальное программное обеспечение.
Необходимость создания систем для автоматизированного проектирования и/или разработки МИЛР возникает вследствие высокой сложности программной реализации системы продукционных правил (СПП), которая напрямую зависит от количества термов, используемых для представления переменных [2].
МИЛР являются альтернативной ступенью развития нечетких регуляторов в плане повышения быстродействия систем автоматического регулирования на их основе, расширения области применения и снижения взаимного влияния контуров регулирования.
Отличительной особенностью структуры МИЛР является отсутствие в ней элементов обработки продукционных правил. Так, в каждом цикле работы МИЛР в процессе сканирования значений непрерывных величин формируется ID-номер, или ключ, продукционного правила, используемый для определения комбинации значений управляющих воздействий в текущий момент t. Комбинации значений управляющих воздействий МИЛР хранятся в массиве или базе данных (зависит от технических характеристик используемых устройств автоматизации).
На рисунке 1 приведена блок-схема МИЛР с n входными параметрами X, k и m выходными параметрами Z и Y, где И1, …, Иn – интервализаторы, а Д1(Z), …, Дk(Z) и Д1(Y), …, Дm(Y) – деинтервализаторы МИЛР; Nmin, Nтек и Nmax – минимальный, текущий и максимальный ID-номер продукционного правила в массиве значений управляющих воздействий в блоке логического вывода (БЛВ) с регулирующей и компенсационной СПП (РСПП и КСПП соответственно); # – элемент ID-номера продукционного правила БЛВ, формируемого из номеров термов T(X1), …, T(Xn) и T(Z1), …, T (Zk).
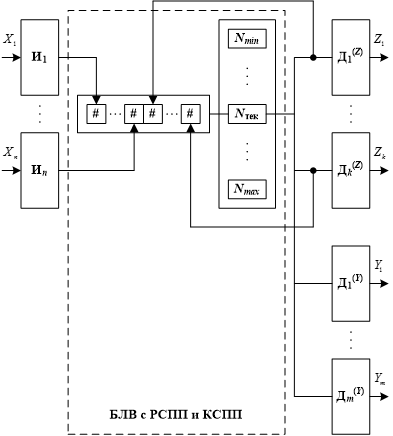
Рисунок 1 – Блок-схема МИЛР с минимизированным временем отклика
В МИЛР, в связи со спецификой работы, взамен стандартных для нечетких регуляторов (НР) понятий “фаззификации” и “дефаззификации”, введены понятия “интервализации” и “деинтервализации”, определенные ниже [3].
Интервализация представляет собой процесс определения принадлежности значения непрерывной величины МИЛР тому или иному интервалу, входящему в диапазон значений данной величины.
Деинтервализация – процесс, обратный интервализации, то есть выделение требуемого значения непрерывной величины из интервала, входящего в диапазон значений данной величины.
Интервализаторы и деинтервализаторы МИЛР представляют собой блоки, реализующие процессы интервализации и деинтервализации соответственно.
ID-номера продукционных правил МИЛР с n входными, k и m выходными параметрами будут расположены в диапазоне от Nmin до Nmax. Правило, ID-номер которого равен 0 предназначено для контроля состояний непрерывных величин и называется “нулевым”, или аварийным, правилом.
На рисунке 2 изображена структурная схема системы автоматизированной разработки МИЛР “САР МИЛР”, разработанной автором (стрелками обозначены внутренние связи между отдельными блоками “САР МИЛР”, каждый из которых является самостоятельным элементом).
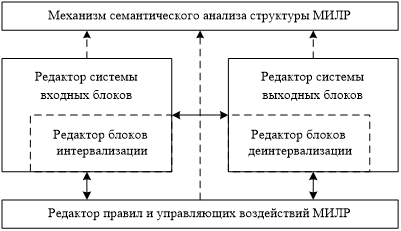
Рисунок 2 – Структурная схема системы автоматизированной разработки МИЛР
Редакторы блоков интервализации и деинтервализации предназначены для создания или редактирования параметров интервализаторов и деинтервализаторов непрерывных физических величин МИЛР с целью дальнейшего преобразования их кода в форматы языков программирования международного стандарта IEC 61131-3 [4].
Редактор правил и управляющих воздействий предназначен для создания и редактирования СПП МИЛР и выполняет следующие основные функции:
– создание и/или редактирование СПП МИЛР с учётом логических связей с редакторами интервализаторов и деинтервализаторов;
– интегрирование СПП в структуру МИЛР;
– проверка правильности вводимых с клавиатуры данных;
– преобразование программы МИЛР в форматы языков программирования, описанных в стандарте IEC 61131-3;
– графическое отображение СПП МИЛР.
Для создания СПП в редакторе реализован собственный графический язык программирования, получивший название STEP GRAPH и основанный на системе интервализаторов и деинтервализаторов МИЛР. При создании правила в редактор продукционных правил добавляются отрезки числовых осей всех входных блоков МИЛР, которые поделены на области, или термы, отмеченные красным цветом. В редактор управляющих воздействий при этом будут добавлены отрезки числовых осей всех выходных блоков МИЛР. Логические переменные будут представлены в виде отрезков, разбитых на две области, которые соответствуют состояниям “0″ и “1″ соответственно [5].
Принцип работы со STEP GRAPH базируется на создании продукционных правил путём выделения необходимых областей, или термов, переменных МИЛР [6]. Для этого надо кликнуть мышью по требуемой области отрезка числовой оси, при этом термы будут автоматически окрашены в зелёный цвет.
На рисунке 3 представлен скриншот главного окна “САР МИЛР”.
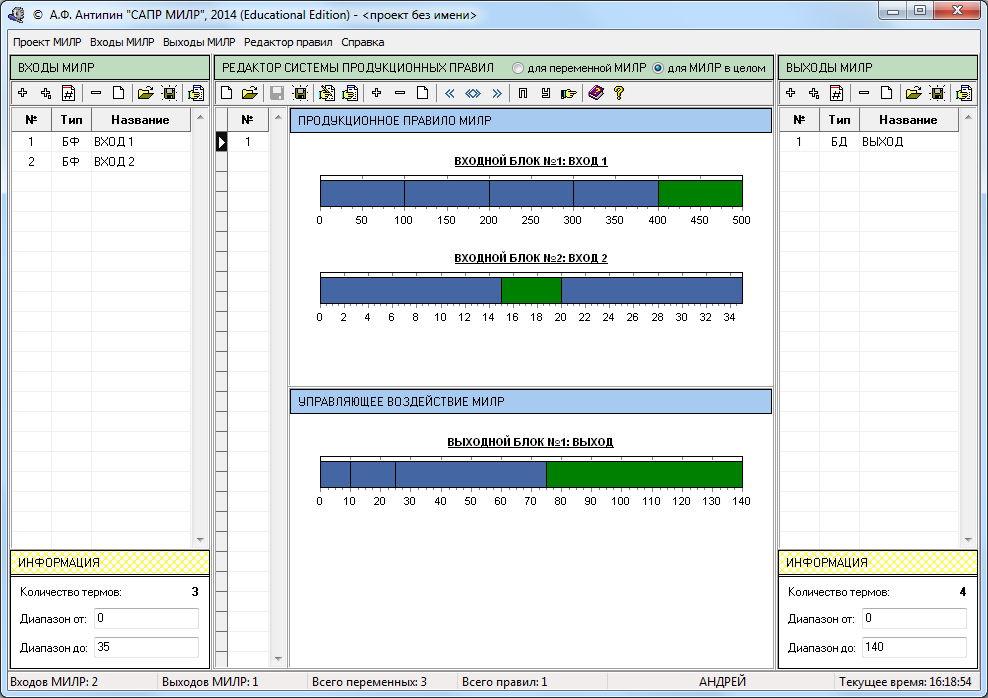
Рисунок 3 – Скриншот главного окна “САР МИЛР”
Проектирование и разработка МИЛР с использованием программы “САР МИЛР” позволяет снизить затраты времени в плане:
– создания систем интервализаторов/деинтервализаторов МИЛР с нужным числом, характером и порядком распределения термов непрерывных величин;
– создания и редактирования СПП в графическом языке программирования STEP GRAPH;
– проведения семантического анализа структуры МИЛР с целью выявления логических ошибок или отклонений от концепции построения;
– генерации программ МИЛР для промышленных контроллеров в формате языков программирования, описанных в международном стандарте IEC 61131-3.
Библиографический список
- Антипин А.Ф. О повышении быстродействия систем интеллектуального управления на базе нечеткой логики // Автоматизация, телемеханизация и связь в нефтяной промышленности. 2013. № 5. С. 22–26.
- Антипин А.Ф. Системы управления технологическими процессами на базе многомерных логических регуляторов // Автоматизация и современные технологии. 2014. № 1. С. 12–18.
- Антипин А.Ф. Особенности программной реализации многомерных логических регуляторов с переменными в виде совокупности аргументов двузначной логики // Автоматизация и современные технологии. 2014. № 2. С. 30–36.
- Антипин А.Ф. Об одном способе анализа структуры многомерного четкого логического регулятора // Прикладная информатика. 2012. № 5. С. 30–36.
- Антипин А.Ф. Способ фаззификации значений непрерывных величин с предсказанием термов в многомерном четком логическом регуляторе // Автоматизация в промышленности. 2013. № 9. С. 65–68.
- Степашина Е.В., Мустафина Е.А. Численный алгоритм уточнения механизма химической реакции DRGEP-методом // Журнал Средневолжского математического общества. 2011. Т. 12. № 3. С. 122.