Гидрофицированные погрузочные манипуляторы и экскаваторы представляют собой сложную пространственную систему, имеющую большое число степеней свободы. Применение погрузочных манипуляторов тем эффективнее, чем большими возможностями он обладает. Современные погрузочные манипуляторы как промышленные, так и сельскохозяйственные, имеют несколько исполнительных гидроцилиндров от 2 до 5 [1, 5, 7].
Традиционное управление каждой степенью подвижности (звеном манипулятора) осуществляется при помощи самостоятельной рукоятки гидрораспределителя. Основная трудность управления погрузочными манипуляторами с пространственным исполнительным механизмом параллельно-последовательной структуры, как например манипуляторами НПМ-0,6 и НПМ-0,8 (рис.1), заключается в сложности координации перемещения органов управления, согласования движений оператора с пространственным положением рабочего органа машины при одновременном выполнении условий точности и быстродействия [2]. Недостаточная скоординированность управляющих воздействий увеличивает суммарное время цикла и длину траектории перемещения рабочего органа. Улучшить эти показатели эффективности управления манипулятором можно, если оператор будет управлять не каждым звеном в отдельности, а задавать направления перемещения собственно рабочего органа [8]. Одним из вариантов решения этой проблемы является управление гидроцилиндрами от одной рукояти.  а) б)
а) б)
Рисунок 1 – Навесные погрузочные манипуляторы параллельно-последовательной структуры НПМ-0,6 (а) и НПМ-0,8 (б)
Разработана система дистанционного электрогидравлического управления погрузочным манипулятором от одной рукоятки. Она состоит из электрогидрораспределителей 1, 2 (рис.2) управления силовыми цилиндрами стрелы 4, 5 и электрораспределителем 3 управления цилиндром рукоятки 6. Рабочая жидкость подается к распределителям от насосной станции 7. Пульт управления 8 электрогидрораспределителями представляет рукоятку 9, шарнирно укрепленную на основании, и кнопок 10, 11, 12, 13, расположенных симметрично относительно рукоятки и кинематически связанных с ней. В рукоятку 9 встроены две кнопки 14 и 15 управления электрогидрораспределителем 3. Кнопки 10, 11, 12, 13 расположены относительно рукоятки таким образом, что возможно замыкание их контактов поочередно или одновременно два соседних. Это позволяет производить перемещение стрелы в направлениях «подъем» (движение рукоятки на себя), «опускание» (рукоятку – от себя), «подъем-поворот» и «опускание-поворот» (рукоятку – от себя по диагоналям), причем совмещение операций подъема или опускания с поворотом возможно влево и вправо (табл. 1). При этом независимо от направления движения стрелы или нахождения ее в покое встроенными в рукоятку 9 кнопками 14 и 15 можно управлять рукоятью манипулятора. Питание электромагнитов распределителей осуществляется от аккумуляторной батареи.
Описанная система управления погрузочными манипуляторами и подобными им машинами повышает удобство управления и снижает утомляемость оператора [4]. Пульт управления (рис.3), выполненный в виде джойстика, умещается в руках, и оператор может находиться в удалении от рабочего органа или в непосредственной близости к нему.
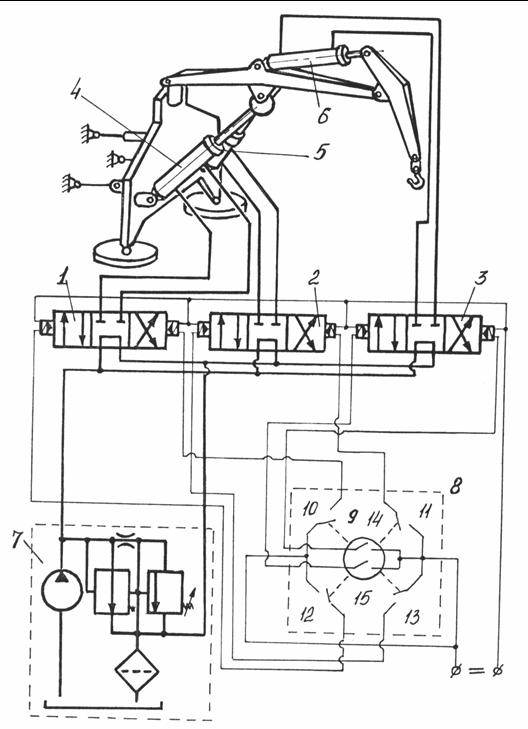 Рисунок 2 – Вариант системы управления манипулятором
Рисунок 2 – Вариант системы управления манипулятором
Таблица 1. Матрица возможных управляющих воздействий на манипулятор посредством пульта управления типа «джойстик»
|
Действие |
Положение контактов (1 – замкнут, 0 – разомкнут) |
|||
|
10 |
11 |
12 |
13 |
|
| Подъем |
1 |
0 |
1 |
0 |
| Опускание |
0 |
1 |
0 |
1 |
| Поворот влево |
1 |
1 |
0 |
0 |
| Поворот вправо |
0 |
0 |
1 |
1 |
| Подъем с поворотом вправо |
0 |
0 |
1 |
0 |
| Подъем с поворотом влево |
1 |
0 |
0 |
0 |
| Опускание с поворотом вправо |
0 |
0 |
0 |
1 |
| Опускание с поворотом влево |
0 |
1 |
0 |
0 |
| Стоп |
0 |
0 |
0 |
0 |
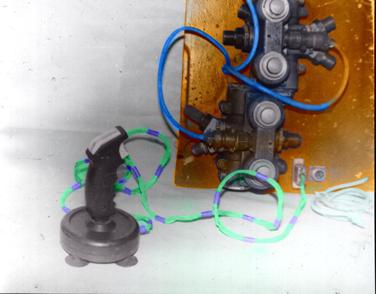 Рисунок 3 – Пульт управления манипулятором типа «джойстик» и блок электрогидрораспределителей
Рисунок 3 – Пульт управления манипулятором типа «джойстик» и блок электрогидрораспределителей
Рукояти управления может быть выполнена и в другом варианте, без кнопок управления гидроцилиндром 6 ( по рис.2) рукояти. Другой вариант устройства для управления гидравлическим манипулятором состоит из корпуса 1 (рис.4), в котором шарнирно установлен рычаг 2 и его подвижная часть 3. На рычаге закреплено рабочее звено 4 с четырьмя кулачками 5. Подвижная часть рычага 3 имеет возможность перемещаться вдоль оси рычага относительно неподвижной части 2 с шарниром 6.
Возврат рычага в первоначальное положение осуществляется пружиной 7. В корпус 1 встроены два ряда контактов в виде микропереключателей 8-11 и 12-15. Контакты 8-11 и 12-15 расположены относительно рычага таким образом, что возможно замыкание их контактов поочередно или одновременно два соседних. Работа устройства осуществляется следующим образом. При перемещении рычага от себя замыкаются контакты 8 и 9, опуская тем самым стрелу манипулятора. При перемещении рычага на себя замыкаются контакты 10 и 11, стрела начинает подниматься. Для поворота стрелы манипулятора в горизонтальной плоскости рычаг следует переместить вправо или влево, замыкая соответственно контакты 9, 10 или 8, 11. Для совмещения подъема с поворотом или опускания с поворотом следует замкнуть только один вариант микропереключателя 8, 9, 10 или 11. Для опускания рукояти манипулятора рычаг следует нажать вниз и переместить от себя, при этом замкнется контакт 13, аналогично производится подъем рукояти, только следует рычаг перемещать вниз и от себя.
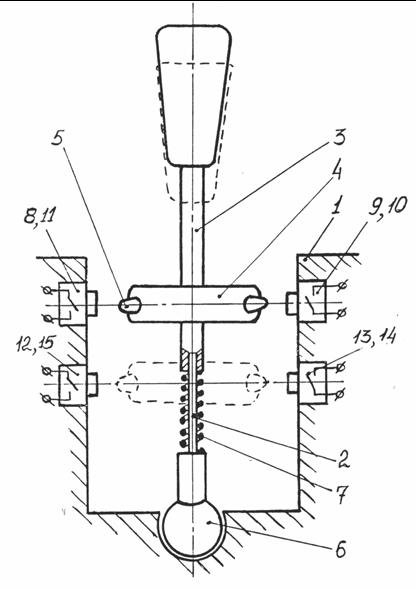 Рисунок 4 – Вариант исполнения пульта управления
Рисунок 4 – Вариант исполнения пульта управления
Представленная система управления является системой прямого управления. Проведенные эксперименты показали, что эффективным средством для существенного повышения производительности манипулятора является оснащение специальными системами управления, которые позволяют совместить рабочие операции, облегчить сам процесс управления [1, 3, 5, 6, 7].
На рис. 5 представлена система управления рабочим оборудованием манипулятора параллельно-последовательной структуры с системой позиционирования. Перемещение грузонесущей стрелы по координатам φ и ψ обеспечивают звенья переменной длины 1 и 2, которые расположены под углом друг к другу и образуют пространственную структуру в виде трехгранной пирамиды неполнопараллельного механизма. Как отмечалось выше, управление перемещением т. Асоздает определенные трудности так, как у оператора в этом случае отсутствует характерное для управления плоскими механизмами, представление о взаимном соответствии координат груза (места захвата и выгрузки) и координат, определяющих положение т. А, а также направление ее движения при включении приводов.
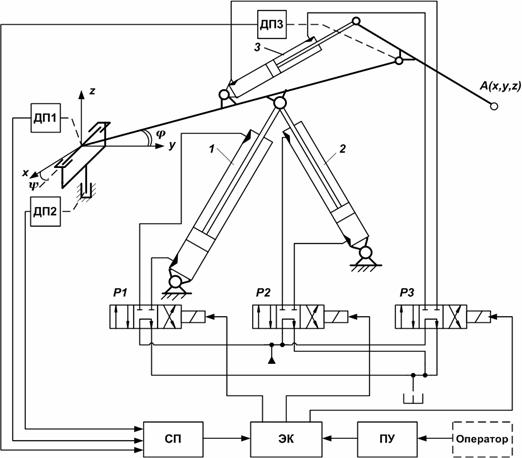 Рисунок 5 – Система прямого управления манипулятором:
Рисунок 5 – Система прямого управления манипулятором:
ПУ – пульт управления; ЭК – блок электронных ключей; СП – система позиционирования; Р1, Р2, Р3 – электрогидрораспределители; 1, 2, 3 – исполнительные цилиндры; ДП1, ДП2, ДП3 – датчики положений.
Система прямого управления манипулятором в нашем случае состоит из пульта управления (ПУ), блока электронных ключей (ЭК), системы позиционирования (СП), электрораспределителей P1, P2…РN и соответствующих исполнительных цилиндров 1,2,3…N, а также датчиков положений ДП1, ДП2 …ДПN.
Для перемещения грузозахватного устройства манипулятора сигнал от пульта управления поступает электронные ключи (ЭК), управляющие электромагнитами распределителей P1, P2…РN. Управление возможно как всеми цилиндрами одновременно, так и дискретно, каждым цилиндром в отдельности.
При достижении манипулятором крайнего положения, либо положения заранее заданного оператором, сигнал от датчика ДПi с логическим состоянием «1» поступает в систему позиционирования (СП), которая переводит соответствующий электронный ключ, управляющий распределителем Рi, в логическом состоянии «0» и движение манипулятора в данном направлении прекращается.
Для ограничения зоны манипулятора, при выполнении конкретных технологических процессов, датчики положений настраиваются соответствующим образом. Ограничение зоны действия т. А манипулятора необходимо при работе в складских помещениях, ангарах во избежание повреждаемости окружающих предметов при ошибке оператора.
Датчики положений звеньев (ДП) и систем позиционирования (СП) может быть настроены для автоматического возврата грузозахватного устройства манипулятора в заданное положение по окончании технологической операции.
Эффективным средством для существенного повышения производительности манипулятора является оснащение автоматизированными системами управления, которые позволяют выполнять повторяющиеся однообразные рабочие операции без участия оператора (например, автоматический возврат грузозахватного устройства манипулятора в заданное положение по окончании технологической операции, перевод рабочего оборудования в транспортное положение), облегчить сам процесс управления и как результат – уменьшение утомляемости оператора.
Библиографический список
- Герасун, В.М. Системы управления манипуляторами на основе пространственных исполнительных механизмов / В.М. Герасун, И.А. Несмиянов // Мехатроника, автоматизация, управление. – 2010. - №2. - С.24-28.
- Жавнер, В.Л. Погрузочные манипуляторы / В.Л. Жавнер, Э.И. Крамской. – Л.: Машиностроение, 1975. – 160 с.
- Жога, В.В. Система управления манипулятора-трипода. / В.В. Жога, И.А. Несмиянов, В.В. Дяшкин-Титов, Н.С. Воробьева // Робототехника и техническая кибернетика. - №4 (5) – 2014. – С.58-62.
- Несмиянов, И.А. Совершенствование систем управления погрузочными манипуляторами / И.А. Несмиянов // Механизация и электрификация сельского хозяйства. – 2002. - №4. – С.21-22.
- Несмиянов, И.А. Система управления погрузочным манипулятором параллельной структуры / И.А. Несмиянов, Н.С. Воробьёва, В.И. Токарев // Вестник Федерального государственного образовательного учреждения высшего профессионального образования Московский государственный агроинженерный университет им. В.П. Горячкина. ФГОУ. Агроинженерия. – 2012. - №3 (54). – с.42-44.
- Несмиянов, И.А. Система управления манипулятора сельскохозяйственного робота / И.А. Несмиянов, В.В. Жога, В.Е. Павловский, Н.С. Воробьева // Известия Нижневолжского агроуниверситетского комплекса: наука и высшее профессиональное образование. – 2014. - №3(35). – с.226-231.
- Несмиянов, И.А. Системы прямого и позиционного управления погрузочным манипулятором с пространственным исполнительным механизмом. / И.А. Несмиянов, Е.Н. Захаров, В.И. Токарев // Робототехника в сельскохозяйственных технологиях: материалы Международной научно-практической конференции. - Мичуринск-Наукоград: Издательство Мичуринского госагроуниверситета, 2014. - С.239-245.
- Юревич Е.И. Основы робототехники: учеб.пособие. – 3-е изд., перераб. и доп. – СПб.: БХВ – Петербург, 2010 – 368 с.:ил.