ПЛАНЕТАРНО-РАДИУСНЫЙ РЕДУКТОР
Московский научно-исследовательский телевизионный институт
ЗАО "МНИТИ", главный специалист
Аннотация
Приводится описание конструкции отечественного планетарно-радиусного редуктора, который по техническому уровню лучше зарубежных планетарно-цевочных аналогов.
Ключевые слова: коэффициент технического уровня, относительная масса редуктора, планетарно-радиусный, радиусное зацепление
RADIUS PLANETARY REDUCER
Moscow Television Research Institute
CJSC «MNITI», Chief Specialist
Abstract
The description of the structure of domestic radius-planetary gear, which is the technical level of the best foreign analogues planetary lantern.
Библиографическая ссылка на статью:
Пахомов С.Н. Планетарно-радиусный редуктор // Современная техника и технологии. 2016. № 4 [Электронный ресурс]. URL: https://technology.snauka.ru/2016/04/10041 (дата обращения: 31.07.2026).
Анализируя тенденцию развития электропривода, специалисты ЗАО «Диаконт» обратили внимание на целесообразность применения в его составе планетарно-цевочных редукторов [1]. Возможность реализации с их помощью больших моментов при меньших габаритах при высокой кинематической точности отвечает требованиям устройств электромеханики в аэрокосмической отрасли, производящей промышленности и приводов промышленных роботов.
Принцип, на котором работает планетарно-цевочный редуктор, был известен давно. Однако уровень технологии того времени не позволял изготавливать детали с требуемой точностью. Сейчас, в полной мере, используя возможности современного технологического оборудования, можно реализовать его ключевые преимущества.
Критерием технического уровня служит относительная масса ɣ = m/T, где m – масса редуктора, кг. Т – вращающий момент, Н∙м. Относительная масса почти не зависит от частоты вращения валов и сравнительно мало изменяется в зависимости от типа и размера редуктора. Это позволяет приблизительно оценивать технический уровень редукторов. В 1984 году значения относительной массы редукторов можно было определить по таблице Рис. 1 [2].

Рис.1. Технический уровень редукторов в 1984 году
Сегодня требования к редукторам значительно выросли (Рис. 2).
| ɣ, кг/ (Н∙м) | Япония | Германия | Россия | Россия |
| Коэффициент технического уровня |
Sumitomo | Nabtesco | НПП «АВВИ» | НТЦ «Редуктор» |
| 0.023…0.0116 | 0.04…0.0156 | 0.027…0.02 | 0.08…0.03 | |
| Габарит, мм | 385х299 | 256х207 | 125х85 | 450х192 |
Рис. 2. Современный технический уровень планетарно-цевочных редукторов
Из таблицы (Рис. 2) видно, что реализовать высокий технический уровень планетарно-цевочные редуктора могут тогда, когда их диаметр больше 100 мм. И это связано с их конструктивными особенностями, которые предполагают применение автономных цевок или пальцев, входящих в отверстия циклоидального диска (Рис. 3).
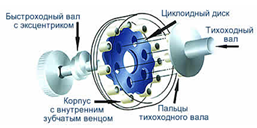

Рис. 3. Планетарно-цевочный редуктор
По патенту [3] пальцы можно заменить зубьями колеса радиусного вида наружного зацепления, а отверстия циклоидального диска заменить радиусными впадинами зубчатого колеса внутреннего зацепления. При этом радиус зубьев наружного зацепления отличается от радиусов впадин зубчатого колеса внутреннего зацепления на величину эксцентриситета (Рис. 4).
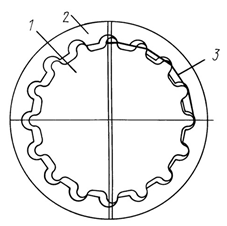
Рис.4. Зубчатая передача внутреннего зацепления со смещенными осями
Так как число зубьев у колес этой передачи одинаково, то меньшее колесо совершает относительно большего колеса только плоскопараллельное движение, передавая момент без кинематического эффекта. Увеличение момента в планетарно-цевочной передаче происходит за счет разности в один зуб между циклоидальным диском и корпусом с внутренним зубчатым венцом. Внутренний зубчатый венец планетарно-цевочного редуктора образуется цилиндрическими роликами, установленными с большой точностью в корпус устройства (Рис. 3). Такую передачу внутреннего зацепления с разностью в один зуб можно заменить более технологичным радиусным зацеплением (Рис. 5) [4].

Рис. 5. Внутреннее радиусное зацепление с разностью в один зуб
Совмещая в одном устройстве зубчатую передачу внутреннего зацепления со смещенными осями и передачу внутреннего радиусного зацепления с разностью в один зуб, получаем планетарно-радиусный редуктор. Наследуя свойства планетарно-цевочного редуктора, он состоит из меньшего числа деталей и, как следствие, имеет меньший вес и габариты устройства, которые участвуют в определении коэффициента технического уровня изделия Рис.6.
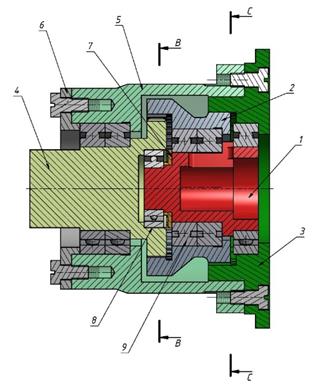
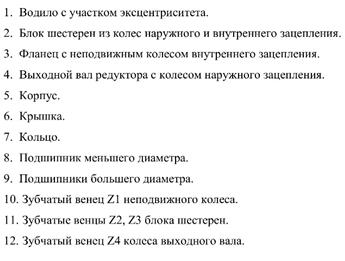
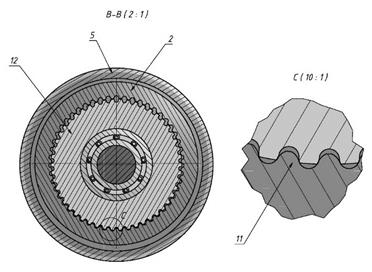
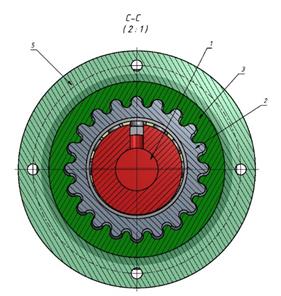
Рис. 6. Планетарно-радиусный редуктор
Передаточное число в планетарно-радиусной передаче определяется числом зубьев меньшего колеса по сечению В-В (2:1). В данном примере Z4 = 50 при модуле m = 1. Зубчатые венцы всех колес данного планетарно-радиусного редуктора представляются траекториями движения режущих кромок концевой фрезы и нарезаются на вертикально-фрезерном станке ЧПУ под управлением системы FANUC. Максимальный радиус концевой фрезы для нарезания зубчатых колес Z3 =51 и Z4 =50 определяется из уравнения [4] r =m∙[Z4∙sin(90°/Z4) - 0,7854] = 0,7851. Дальнейшее уменьшение модуля требует использования электроэрозионных технологий.
Одним из преимуществ современной планетарно-цевочной передачи является число цевок одновременно передающих крутящий момент. Большой коэффициент перекрытия в своих передачах подтверждает компьютерное моделирование напряжений (Рис. 7), возникающее в зубчатых зацеплениях планетарно- радиусного редуктора, спроектированного по Рис. 6.
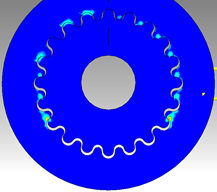
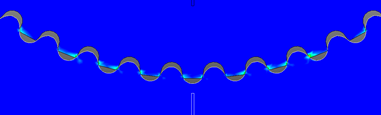
Рис. 7. Зубья передач планетарно-радиусного редуктора, одновременно участвующие в передаче крутящего момента
Планетарно-радиусный редуктор (Рис. 6) был рассчитан на мощность 1 квт. При такой мощности сервопривод с редуктором i = 50 [5] может создавать момент на выходе М = 239 Н∙м. При весе редуктора 20 кг его коэффициент технического уровня равен ɣ = 0,00837 кг/Н∙м, что в 1,4 раза лучше Японского редуктора фирмы Sumitomo.
Таким образом, планетарно-радиусные редукторы являются разработкой отечественного машиностроения. Обладая преимуществами планетарно-цевочных передач, их коэффициент технического уровня лучше импортных устройств аналогичного назначения.
Библиографический список
- Алексанин С.А., Лысый М.Н., Моралес Г.Х., Николаев В.В., Уваров М.М., Перспективы развития технологии и рынка приводных решений: куда движется привод // Современные технологии управления, 2013. - №11 (35).
- Чернавский С.А., Свесарев Г.А., Козинцов Б.С. и др. Проектирование механических передач. – М.: Машиностроение. 1984. стр. 558.
- Пахомов С.Н., Густов К.И. Зубчатая передача внутреннего зацепления со смещенными осями. РФ Патент № 2060422. 12.07.1993.
- Пахомов С.Н. Радиусная альтернатива эвольвентному зацеплению // Современная техника и технологии. 2016. № 1 [Электронный ресурс]. URL: http://technology.snauka.ru/2016/01/9467
- www. Electroprivod.ru // Электронная версия каталога.
Все статьи автора «Пахомов Сергей Николаевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.